

Electromagnetic driving two-degrees of freedom spherical robot wrist and control method thereof
An electromagnetic-driven, degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of realizing the active and passive wrist working modes without control, the inability to accurately model and calculate the magnetic field, and the difficulty of magnetic field calculation, etc., to achieve Achieve precise decoupling and structural parameter optimization, realize accurate modeling and calculation of magnetic field, and achieve high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
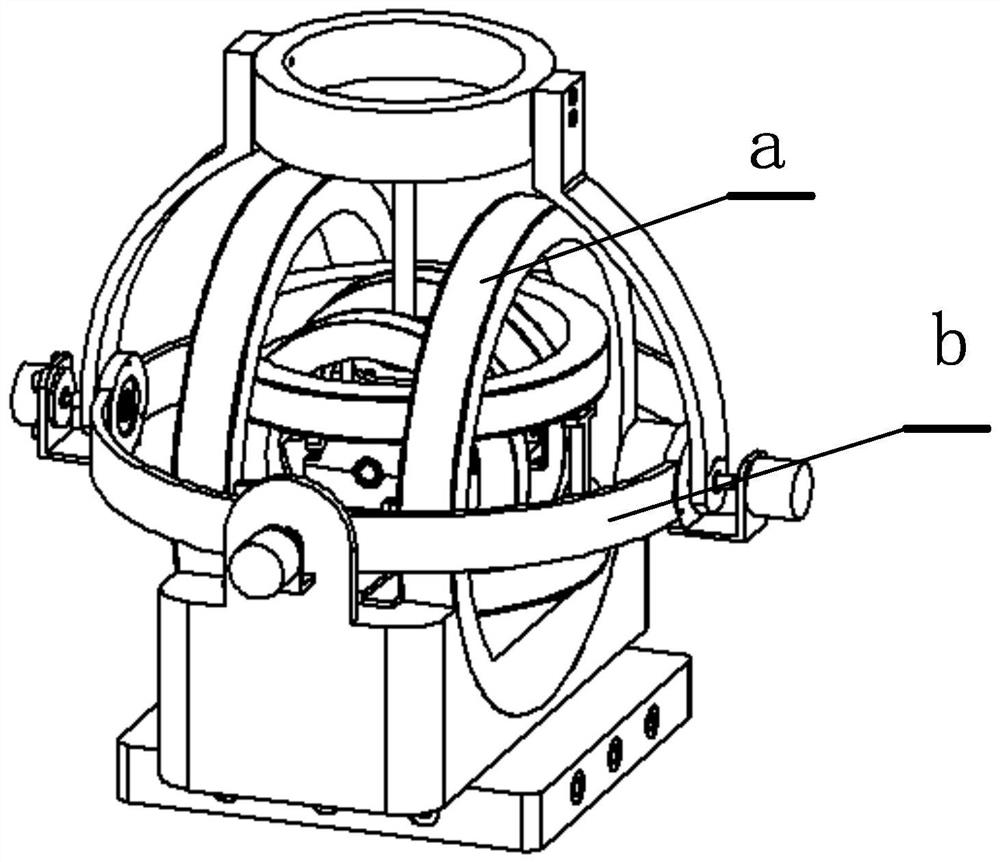
[0058] Such as figure 1 As shown, the two-degree-of-freedom spherical robot wrist h of the present invention includes a three-axis Helmholtz coil group a and a rotor follower part b. The three-axis orthogonal Helmholtz coil group a provides a spatially universal rotating magnetic field, and the rotor follower part b provides a rotating magnetic field coaxially following the magnetic moment to drive the two degrees of freedom rotation of the lower side swing and pitch; the working principle adopts a spatially universal Coaxial servo moment effect to the rotating magnetic field.
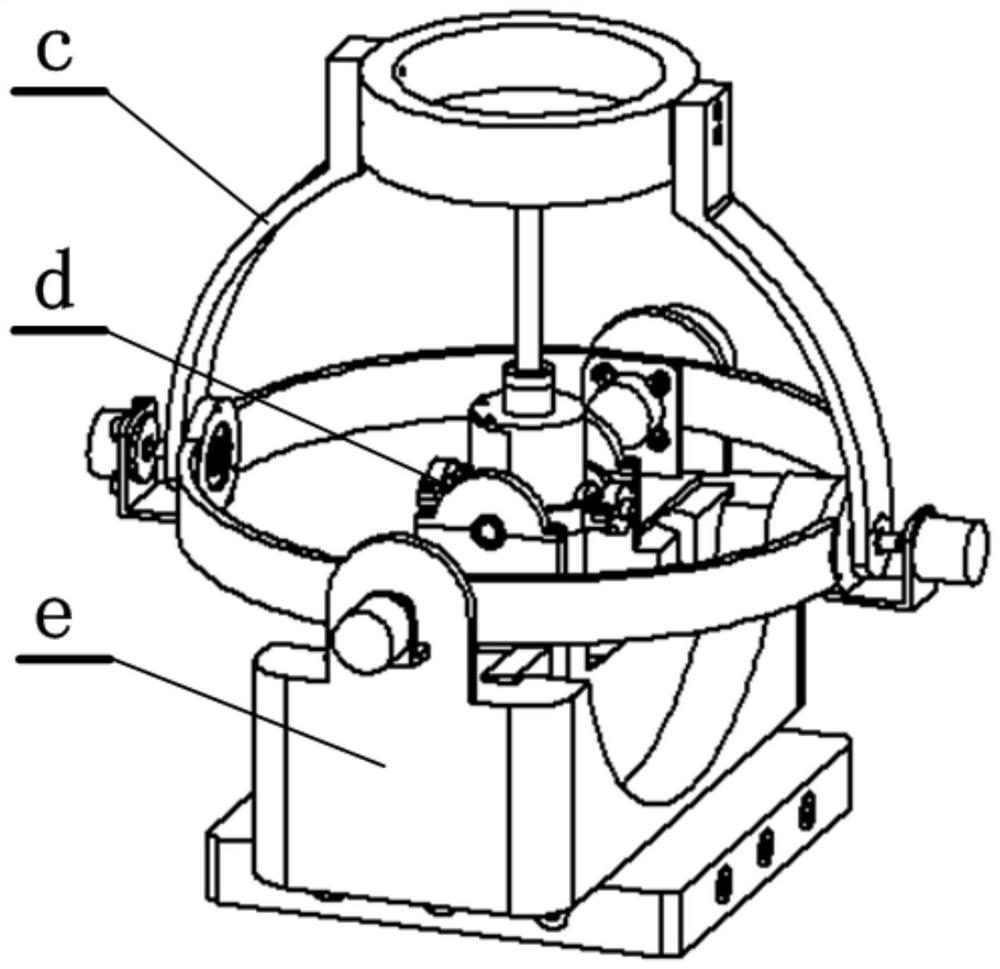
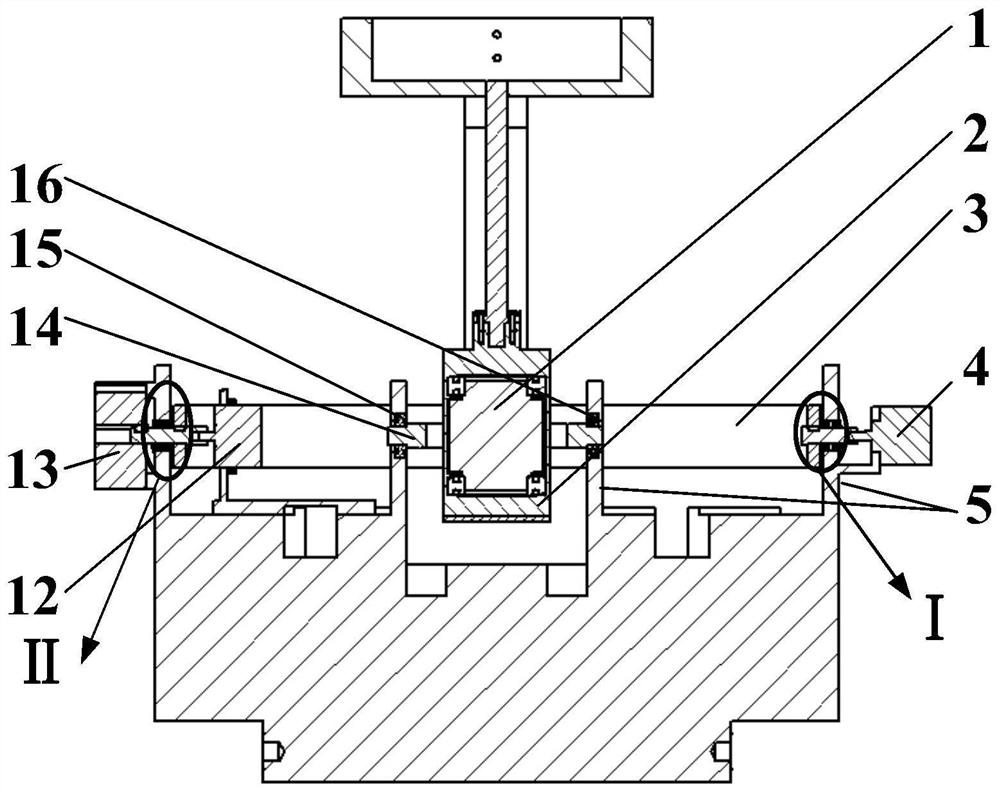
[0059] combine figure 2 , 3(A) ~3(C), 3(D)~3(H) illustrate the composition of the wrist rotor follower part b of the novel electromagnetically driven two-degree-of-freedom spherical robot of the present invention.
[0060] The rotor follow-up p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More