

Priori knowledge guided robot operation skill learning system and method
A priori knowledge and learning system technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of long training time and low learning efficiency of robot skills, so as to reduce learning difficulty, improve flexibility and improve learning efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] This embodiment discloses a robot operation skill learning system guided by prior knowledge, which applies expert experience knowledge and prior knowledge of operation process rules to a reinforcement learning method to reduce invalid exploration in the process of learning robot operation skills. Effectively improve learning efficiency and reduce learning difficulty.
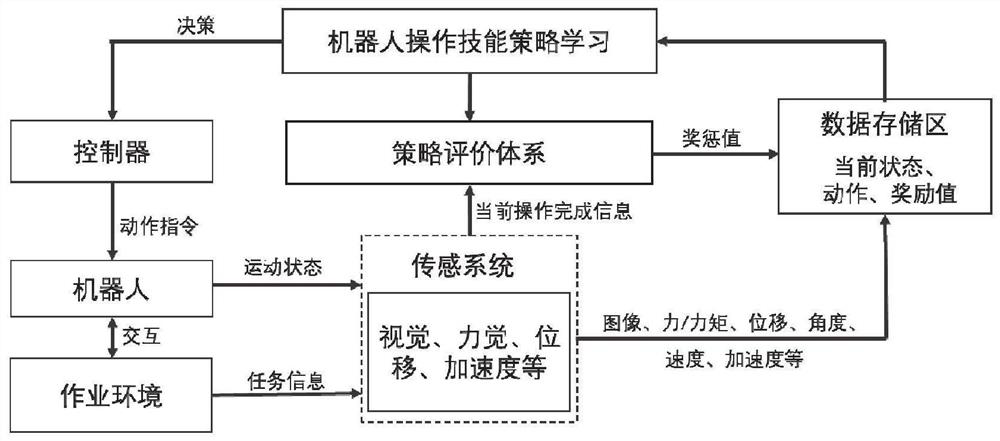
[0029] figure 1 The robot operation skill learning system shown is divided into four parts: physical environment module, evaluation module, robot operation skill strategy learning module, and data storage area. The physical environment module includes robot, controller, sensor system (including vision system, force sensory system, joint sensing system, etc.). The sensing system mainly collects the main information of the robot's working environment, including: the end contact force of the manipulator, the motion state of the manipulator, and the image of the current assembly workpiece. The evaluation mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More