

Robot motion planning method based on DMPs and corrected obstacle avoidance algorithm
A robot movement and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the pain points of obstacle avoidance effects, achieve the effect of maintaining similarity, reducing the loss of free space, and improving obstacle avoidance capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in detail below with reference to the accompanying drawings and examples.
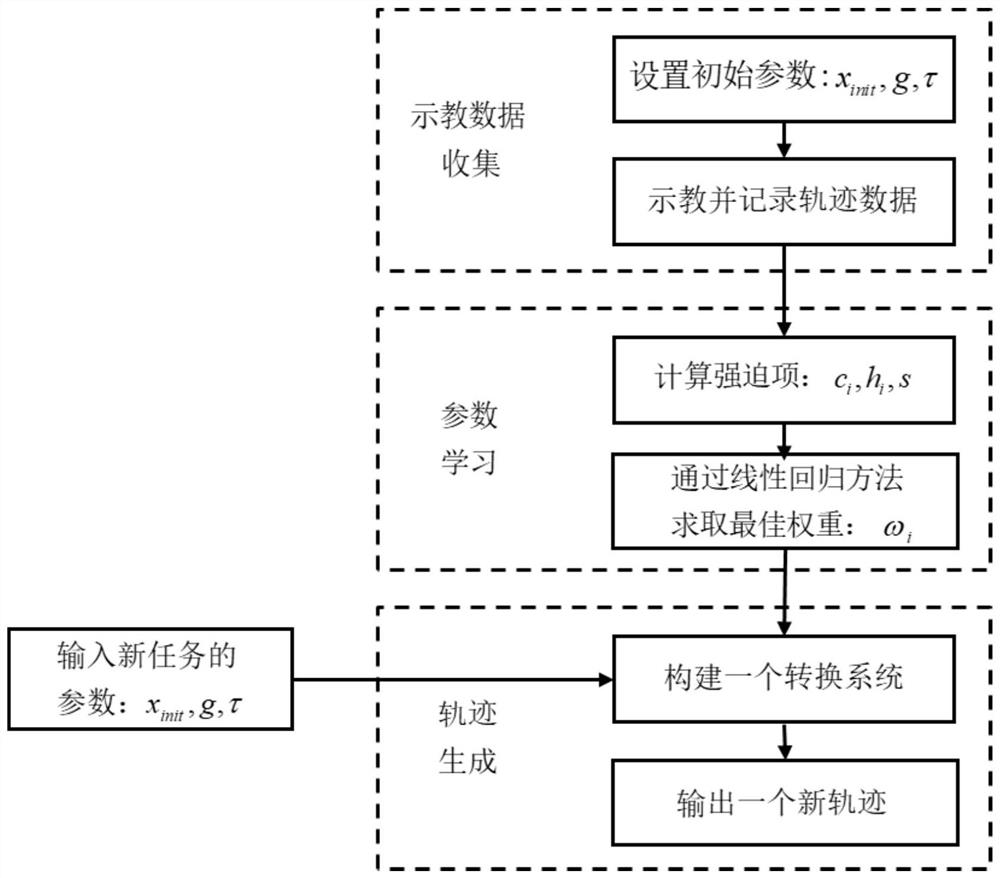
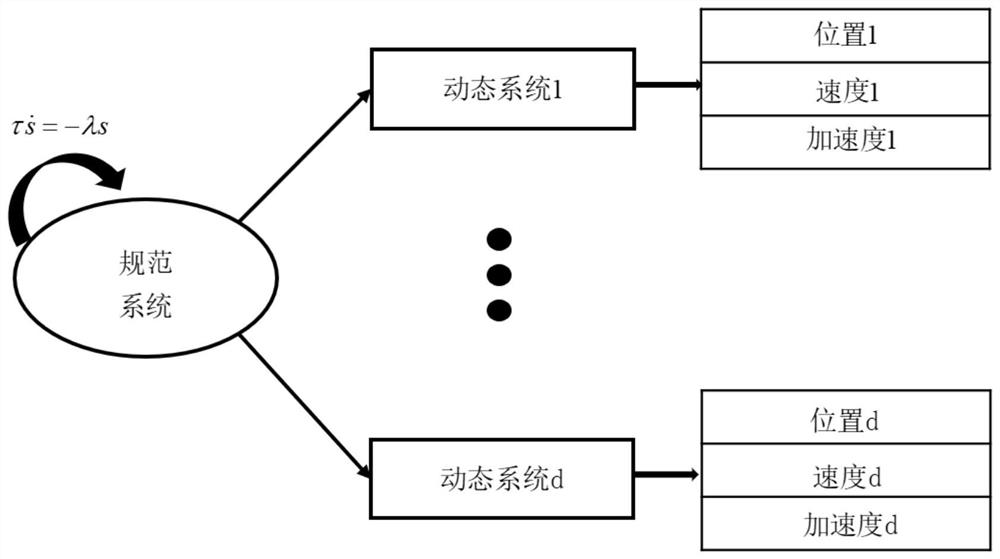
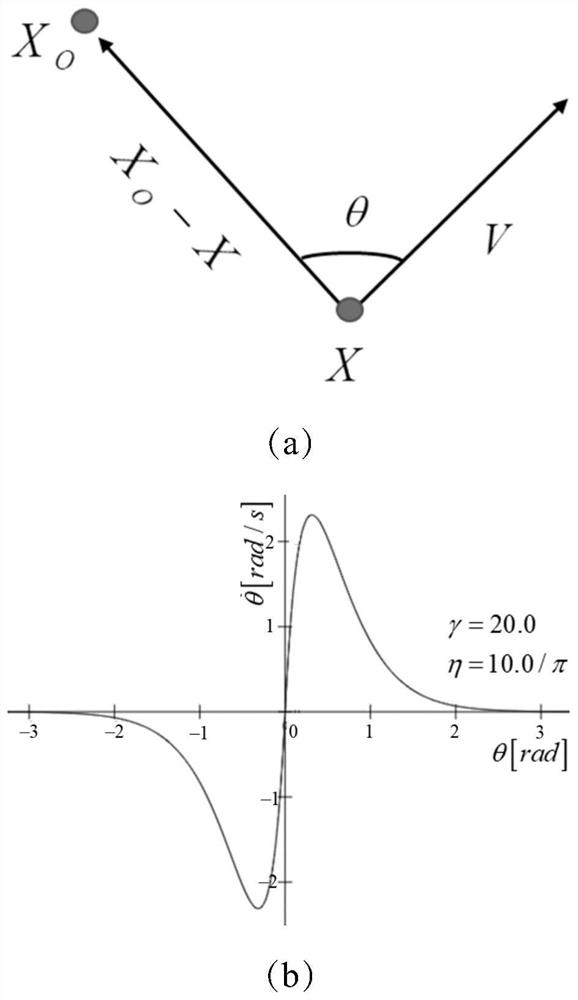
[0059] The modified obstacle avoidance method is a new practical technology developed based on the traditional steering behavior method and considering the obstacle avoidance effect and the characteristics of DMPs. Its most prominent feature is that it can eliminate jitter and improve the obstacle avoidance ability of the system. At the same time, it can keep the attributes of the expected trajectory as much as possible, reduce the loss of free space, and adapt to the dynamic changes of obstacles. The significance of combining the two is that it can realize motion planning in an obstacle environment. DMPs are responsible for learning the teaching trajectory and generating the expected trajectory, and modifying the obstacle avoidance algorithm to assist DMPs to achieve the obstacle avoidance effect.
[0060] The invention provides the robot motion planning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More