

Dynamic planning method and device based on automatic driving
A dynamic planning and automatic driving technology, applied in measurement devices, two-dimensional position/lane control, non-electric variable control, etc., can solve problems such as lane-level planning performance bottlenecks, improve data processing efficiency, and reduce data processing load. , the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
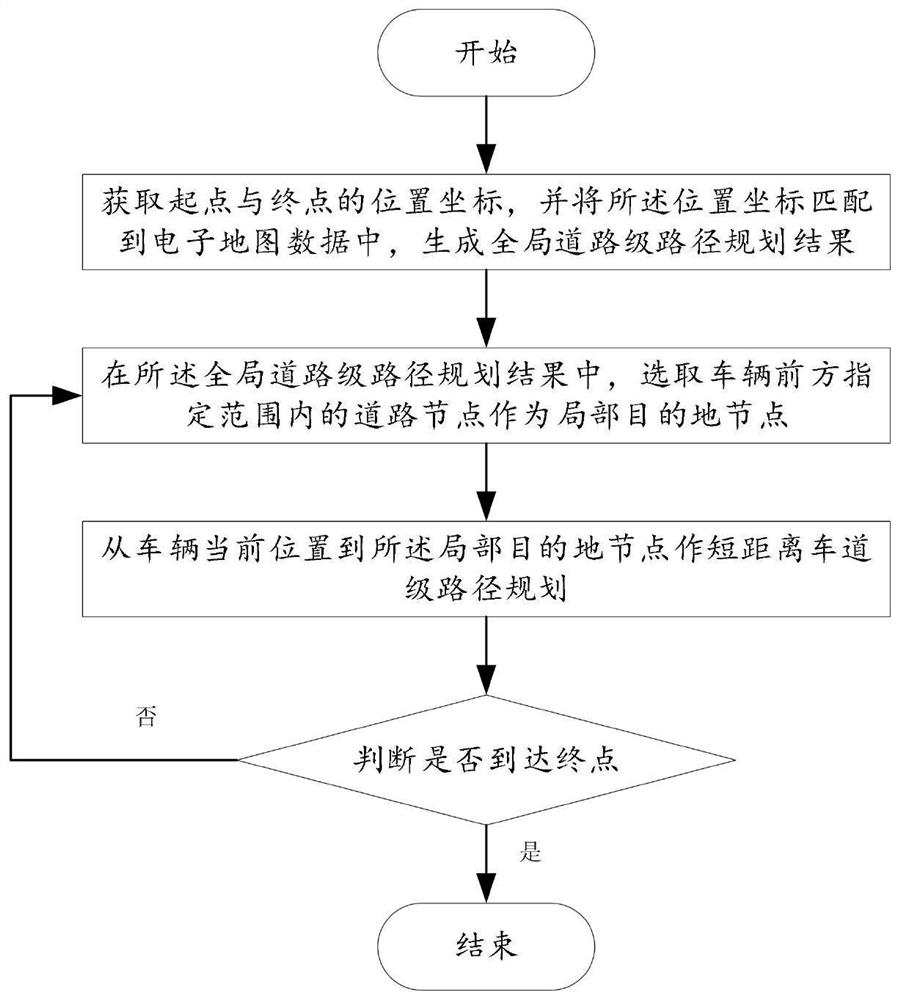
[0042] Since the vehicle is in the process of automatic driving, only the driving assistance information in the local range ahead in one processing cycle does not need the global path planning results to the end point. Based on this characteristic, the present invention adopts a dynamic planning based on automatic driving Algorithm to solve the performance bottleneck of lane-level planning in long-distance calculation.
[0043] In this embodiment, the long-distance road-level planning results need to be calculated first. In the path planning process in high-precision map navigation, the conventional practice is to directly output the lane-level path planning results. In this way, the high-precision lane-level road network is more complex than the road-level road network, and the amount of map element data involved in lane-level planning is too large, resulting in excessive data processing load per unit time and low efficiency in the early path planning. This step can effectiv...
Embodiment 2
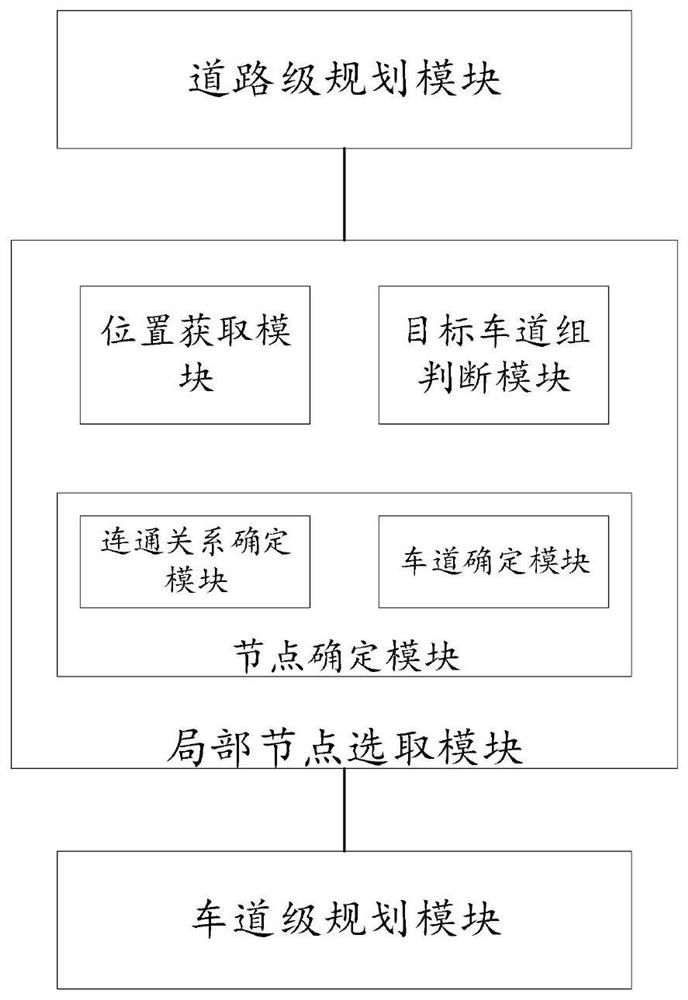
[0059] Such as image 3 As shown, the embodiment of the present invention provides a dynamic planning device based on automatic driving, including:
[0060] The road-level planning module obtains the position coordinates of the starting point and the end point, and matches the position coordinates to the electronic map data to generate a global road-level path planning result;
[0061] The local node selection module selects a road node within a specified range in front of the vehicle as a local destination node in the global road-level path planning result;
[0062] The lane-level planning module performs short-distance lane-level path planning from the current position of the vehicle to the local destination node.
[0063] Further, the local node selection module includes:
[0064] The position acquisition module acquires the current vehicle position information in real time, and determines the position of the vehicle in the global road-level path planning result;
[0065...
Embodiment 3
[0073] An embodiment of the present invention provides a dynamic planning device based on automatic driving, including:
[0074] memory for storing computer software programs;
[0075] The processor is configured to read and execute the computer software program stored in the memory, so as to implement the dynamic programming method based on automatic driving described in Embodiment 1 of the present invention.
[0076] It should also be noted that when the logical instructions in the computer software program can be implemented in the form of software functional units and sold or used as independent products, they can be stored in a computer-readable storage medium. Based on such an understanding, the technical solution of the embodiment of the present invention is essentially or the part that contributes to the prior art or the part of the technical solution can be embodied in the form of a software product, and the computer software product is stored in a storage medium , i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More