

Self-adaptive fault-tolerant control method for supercavitation navigation body
A supercavitation vehicle, fault-tolerant control technology, applied in the direction of hull, hull design, special data processing applications, etc., can solve problems such as input saturation and gain failure of the vehicle, reference trajectory deviation, low efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0096] An adaptive fault-tolerant control method for a supercavitating vehicle, the control method has the following steps:
[0097] Step 1: Design the mathematical model of the supercavitating vehicle;
[0098] Step 2: Establish a model of system uncertainty and actuator failure through the mathematical model of step 1;
[0099] Step 3: Design an adaptive control law through the model of step 2.
[0100] Further, the step 1 specifically includes the following steps:
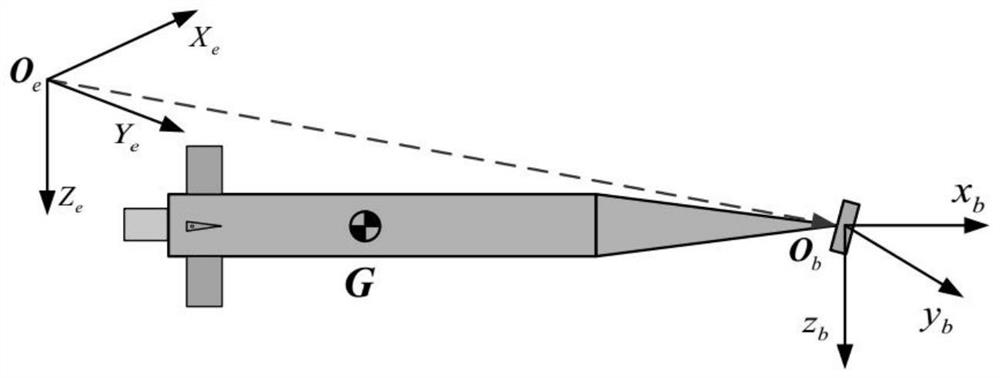
[0101] Step 1.1: Establish an inertial reference frame O e x e Y e Z e , whose origin is the sea level; establish a fixed coordinate system O b x b the y b z b , the origin of the vehicle coordinate system is located at the pressure center of the cavitator, x b The axis points to the symmetry axis of the vehicle, y b The axis points to the right side of the vehicle, z b The axis satisfies the right-hand rule pointing down;
[0102] The cavitator is installed at the head of the vehicle, for the cavit...
Embodiment 2
[0176] The multiplicative fault model is given by:
[0177]
[0178] The additive fault model is:
[0179]
[0180] The initial state of the supercavitating vehicle is z=-0.5m, w=2m / s, θ=0° and q=10° / s, and the given control gain parameter is κ 1 =[20,20] T ,κ 2 =[4,4] T ,λ=2,γ=2,ε=20,
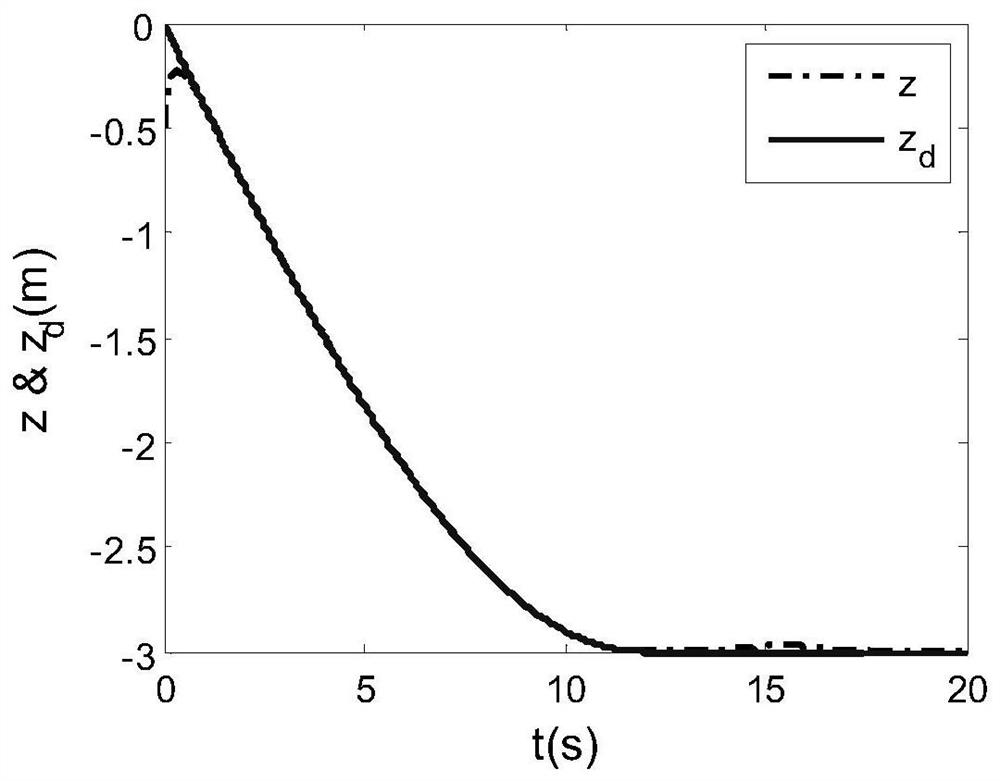
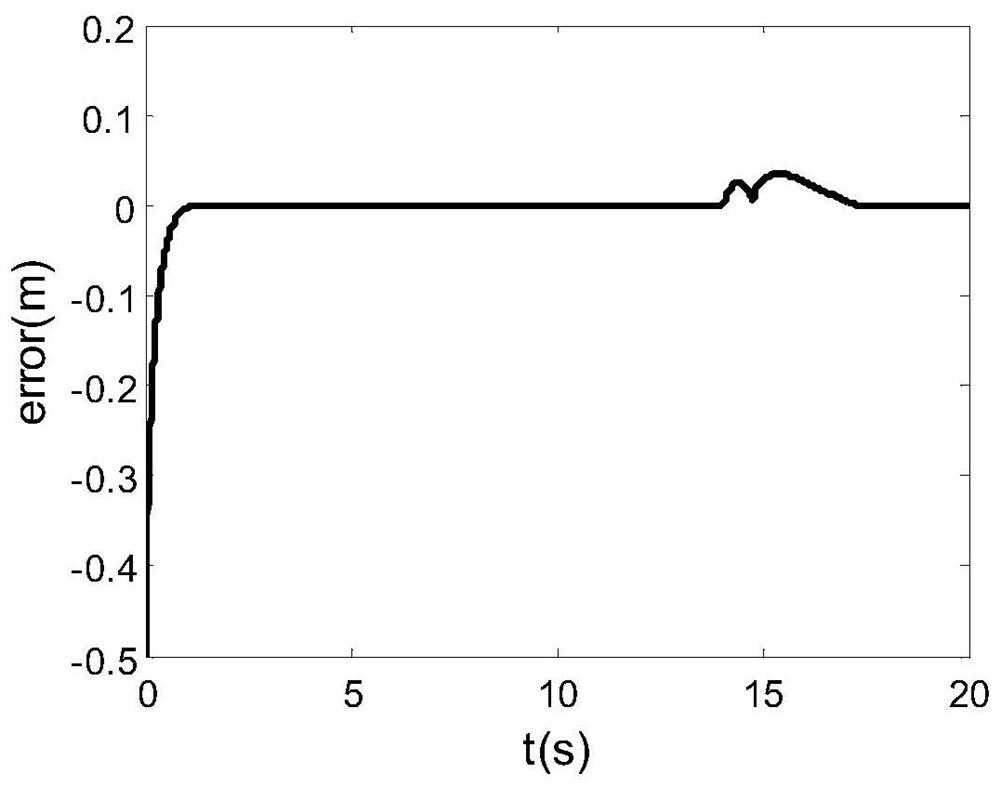
[0181] The simulation mainly verifies two parts: first, whether the designed fault-tolerant control can accurately, quickly and stably track the designed expected trajectory when the system does not fail; secondly, when the system fails (the fault is introduced after 14 seconds), Whether the designed adaptive estimation law can effectively suppress the unknown uncertainty caused by the fault and whether the fault-tolerant control law can effectively control the fault and make the system re-stabilized; the simulation results are as follows: Figure 2-Figure 9 .
[0182] Depend on Figure 2-Figure 7 It can be seen that the designed adaptive fault-tolerant control law can effectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More