

Lane line clustering method and device
A clustering method and lane line technology, applied in the field of image processing, can solve problems such as poor clustering effect in complex scenes and affecting the accuracy of lane line recognition results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
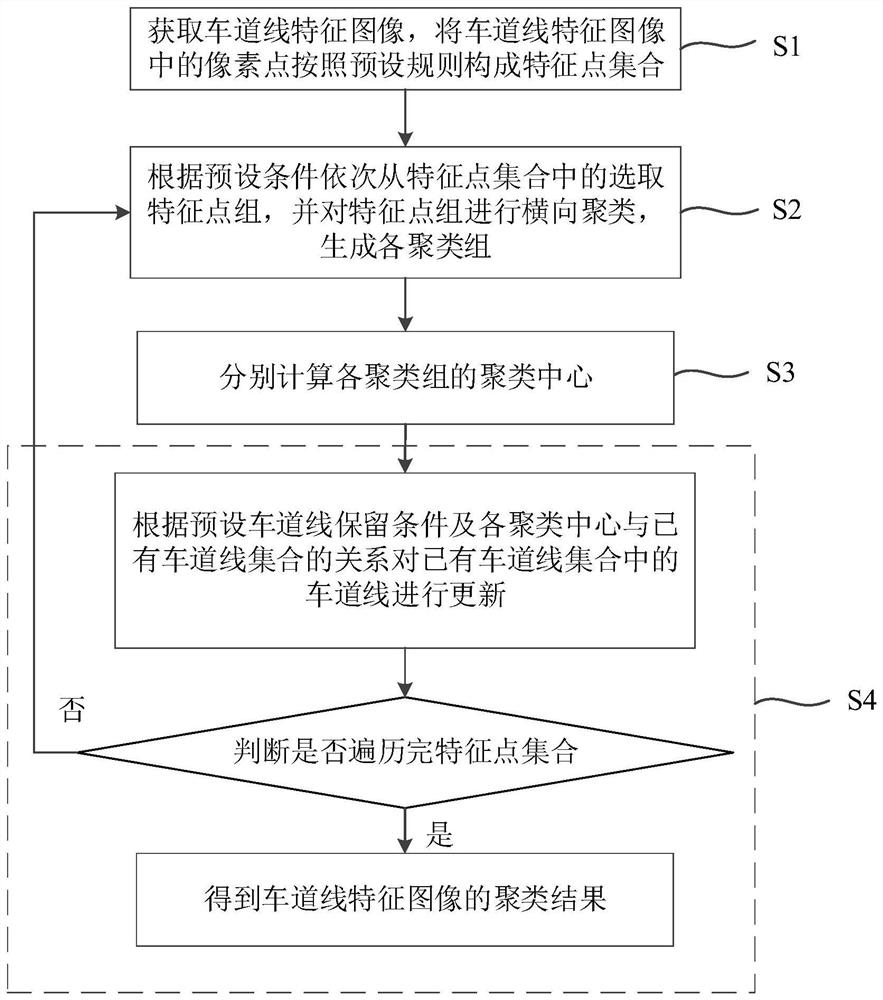
[0033] An embodiment of the present invention provides a lane line clustering method, such as figure 1 As shown, the lane line clustering method includes:
[0034] Step S1: Obtain the feature image of the lane line, and form a set of feature points according to the preset rules from the pixels in the feature image of the lane line. Specifically, in practical applications, the lane line feature image is a segmentation result image obtained by segmenting the image containing the lane line by pixel, and the preset rule is to divide the lane line feature image by row from bottom to top according to the pixel points. Grouping and sorting constitutes a set of feature points.
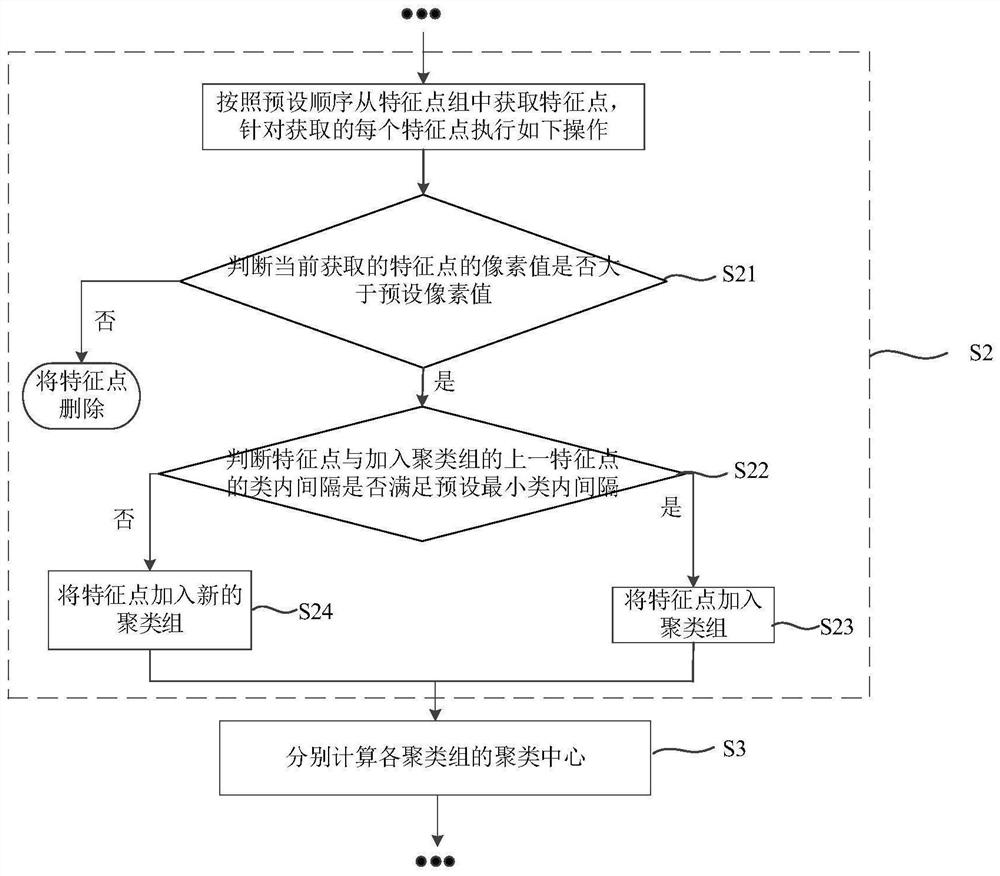
[0035] Step S2: Select feature point groups from the feature point set sequentially according to preset conditions, and horizontally cluster the feature point groups to generate cluster groups. Specifically, in practical applications, the preset condition is to sequentially select feature point groups from t...
Embodiment 2
[0073] An embodiment of the present invention provides a lane line clustering device, such as Figure 7 As shown, the lane line clustering device includes:
[0074] The first processing module 1 is used to obtain the lane line feature image, and the pixel points in the lane line feature image form a feature point set according to preset rules. For details, refer to the relevant description of step S1 in Embodiment 1.
[0075] The second processing module 2 is used to sequentially select feature point groups from the feature point set according to preset conditions, and carry out horizontal clustering to the feature point groups to generate each cluster group. For details, refer to the relevant description of step S2 in Embodiment 1.
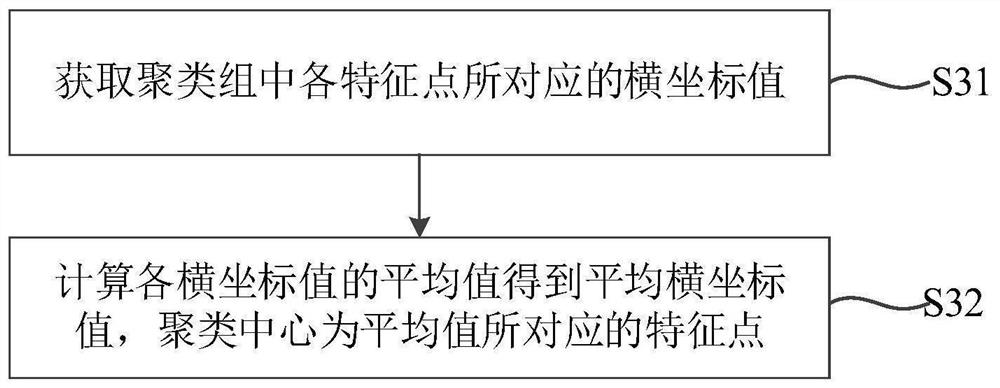
[0076] The third processing module 3 is used to calculate the cluster center of each cluster group respectively. For details, refer to the relevant description of step S3 in Embodiment 1.
[0077] The fourth processing module 4 is used to upd...
Embodiment 3
[0080] An embodiment of the present invention provides a non-transitory computer storage medium, the computer storage medium stores computer-executable instructions, and the computer-executable instructions can execute the lane line clustering method in any of the above-mentioned method embodiments, wherein the above-mentioned storage medium It can be a magnetic disk, an optical disk, a read-only memory (Read-Only Memory, ROM), a random access memory (Random Access Memory, RAM), a flash memory (Flash Memory), a hard disk (Hard DiskDrive, abbreviation: HDD) Or a solid-state drive (Solid-State Drive, SSD), etc.; the storage medium may also include a combination of the above-mentioned types of memories.
[0081] Those skilled in the art can understand that all or part of the processes in the methods of the above embodiments can be implemented through computer programs to instruct related hardware, and the programs can be stored in a computer-readable storage medium. , may include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More