

A cable-controlled aerial positioning plant protection robot
A robot and plant protection technology, which is applied in the device, application, animal husbandry, etc. of catching or killing insects, can solve the problems of high labor intensity, low carrying capacity, high labor cost and management cost, improve work efficiency and reduce labor Strength, to achieve the effect of spray watering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
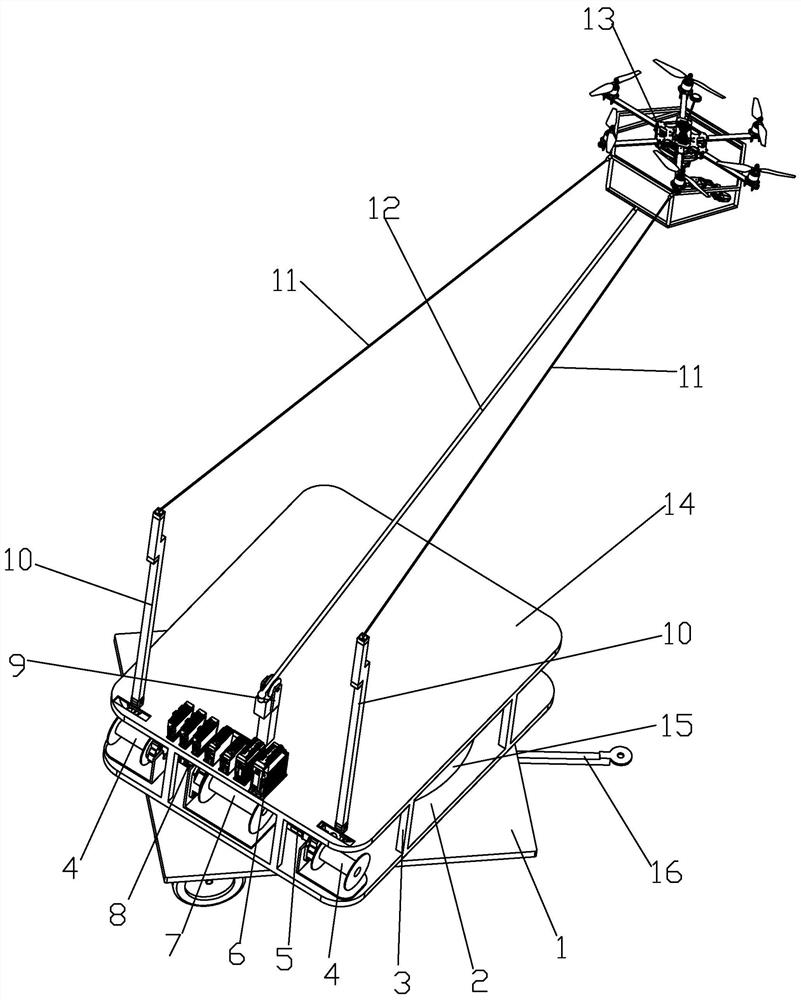
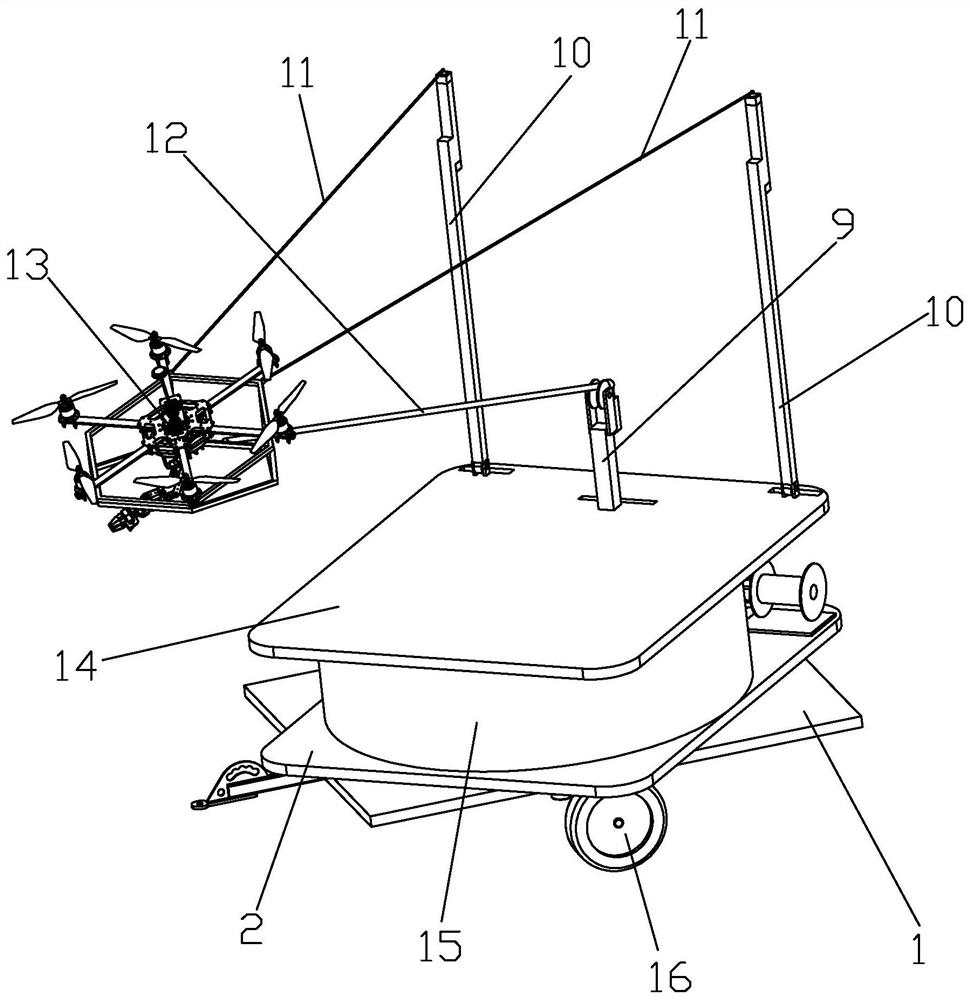
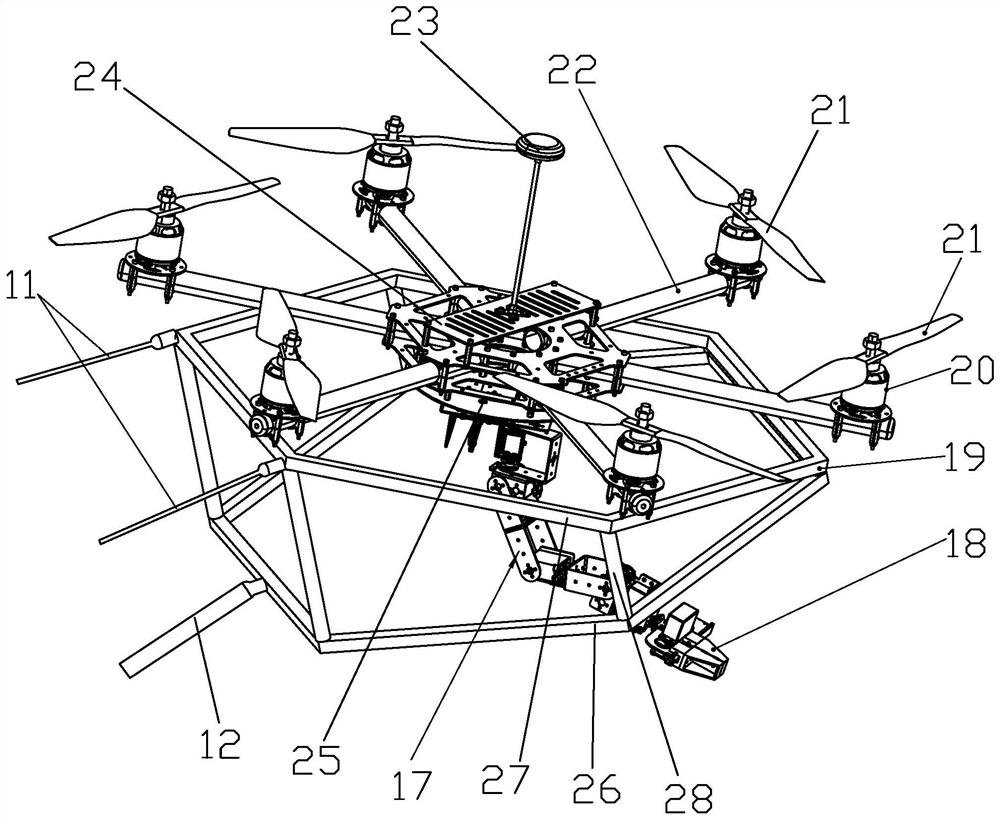
[0018] like Figure 1 to Figure 4 As shown, the cable-controlled aerial positioning plant protection robot of the present invention includes a trolley platform 1 , a pallet 2 , a medicine storage tank 15 , a take-off and landing platform 14 , a controller 6 , a control wire rope 11 , a combined cable 12 , and a robot turntable 13 .
[0019] Two ends of the trolley platform 1 are connected with tow hooks 16 that can be positioned on the vehicle, and the bottom surface of the trolley platform 1 is also connected with wheels for easy movement. The pallet 2 is connected to the trolley platform 1 , the medicine storage tank 15 is arranged on the pallet 2 , and the take-off and landing platform 14 is arranged above the medicine storage tank 15 . A support column 3 is connected between the periphery of the bottom surface of the lift platform 14 and the periphery of the upper surface of the pallet 2, and the medicine storage tank 15 is positioned in the space between the upper surface...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More