Beam assisted positioning method for craniotomy and positioning system of beam assisted positioning method for craniotomy
An auxiliary positioning and beam technology, applied in the field of neurosurgery, can solve problems such as prolonging the preoperative preparation time, increasing the workload of doctors, and difficulty in surgical positioning, so as to alleviate the fatigue of medical staff, improve safety and rationality, reduce The effect of preoperative preparation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
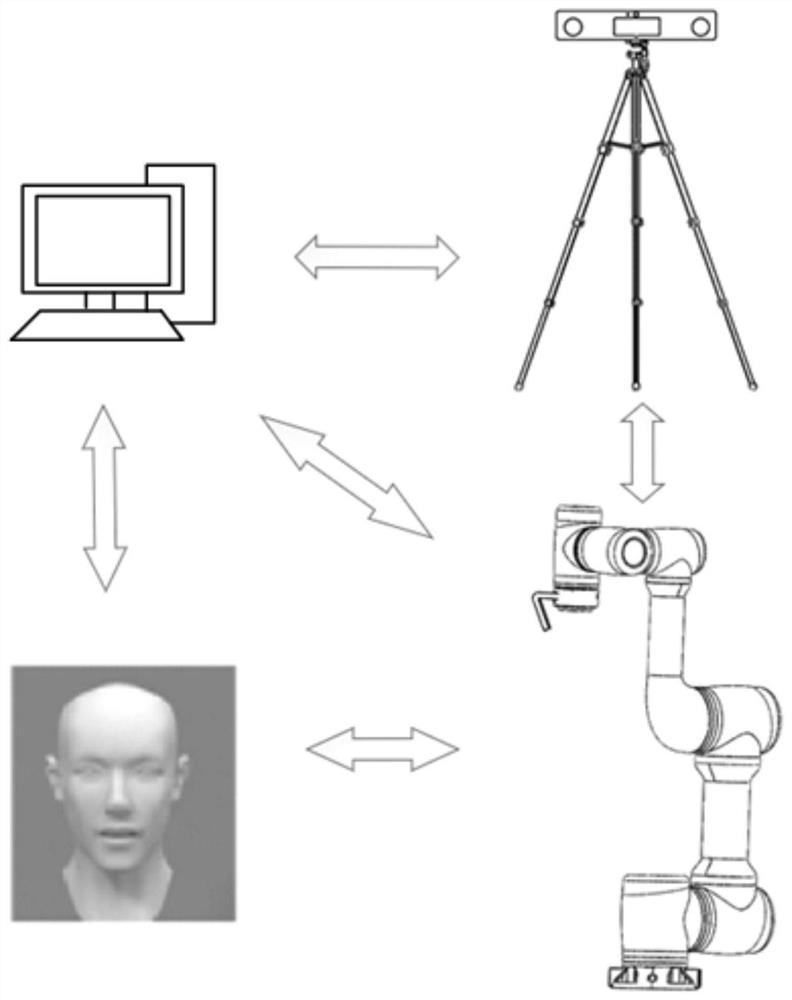
[0031] Such as figure 1 As shown, a beam-assisted positioning system includes a preoperative planning system, a beam positioning device, and a binocular vision camera with a three-dimensional coordinate system registration function; wherein, the preoperative planning system includes a processor and a display connected to the processor; The beam positioning device includes a six-degree-of-freedom robotic arm set on the trolley, a beam emitter set at the end of the six-degree-of-freedom robotic arm, and a robotic arm controller that controls the movement of the six-degree-of-freedom robotic arm; the binocular vision camera is set on the camera On the bracket; the binocular vision camera and the controller of the robotic arm are respectively connected to the processor through wired or wireless means.
Embodiment 2
[0033] A beam-assisted positioning method for craniotomy based on the beam-assisted positioning system of embodiment 1, the specific steps are as follows:
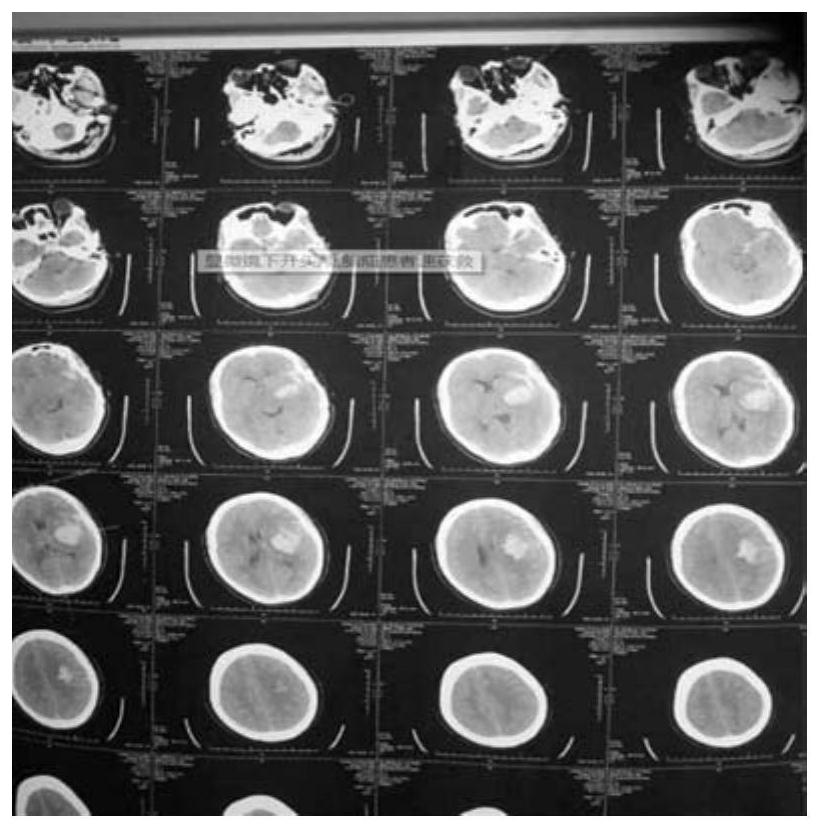
[0034] S1, such as figure 2 As shown in Fig. 1, the patient's skull CT image is collected, and the CT slice data is used to perform multi-surface reconstruction in the image coordinate system, and the following is obtained: Figure 3(a) ~ Figure 3(d) Transverse, sagittal, coronal, and three-dimensional views of the patient's skull face and scalp shown;
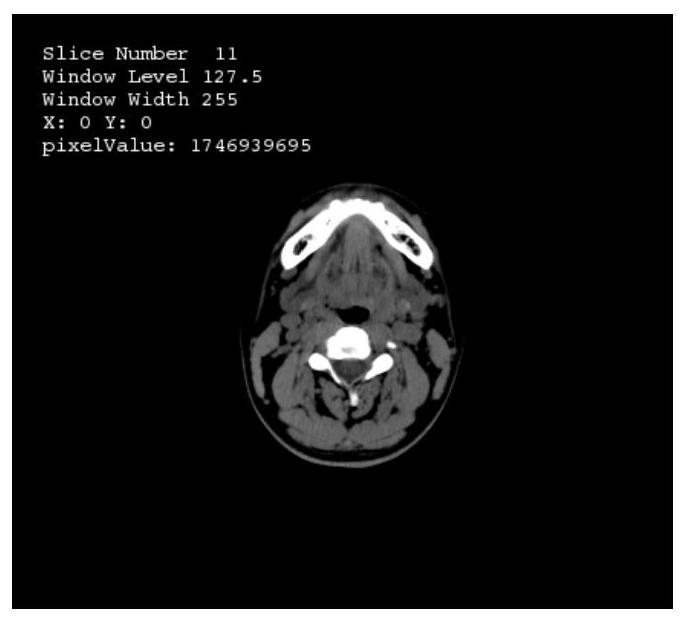
[0035] In this step S1, the image processing is realized based on the development tool VTK, and the specific steps are:
[0036] S101. Using the ITK function library to read the loaded CT slice data; utilizing the different densities of muscles, bones and skin and thus having different pixel gray values in the CT image, the gray value in the CT slice data is calculated Threshold segmentation is to classify by setting a reasonable threshold range. Specifically, the dat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More