

A Portable Wearable Upper Limb Rehabilitation Robot
A rehabilitation robot and wearable technology, which can be used in passive exercise equipment, physical therapy and other directions, can solve the problems of restricting the non-fixed axis micro-motion of moving joints, reducing the patient's sense of participation and rehabilitation effect, and failing to achieve auxiliary functions. The effect of reducing non-axial damage, improving rehabilitation effect and reducing secondary damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
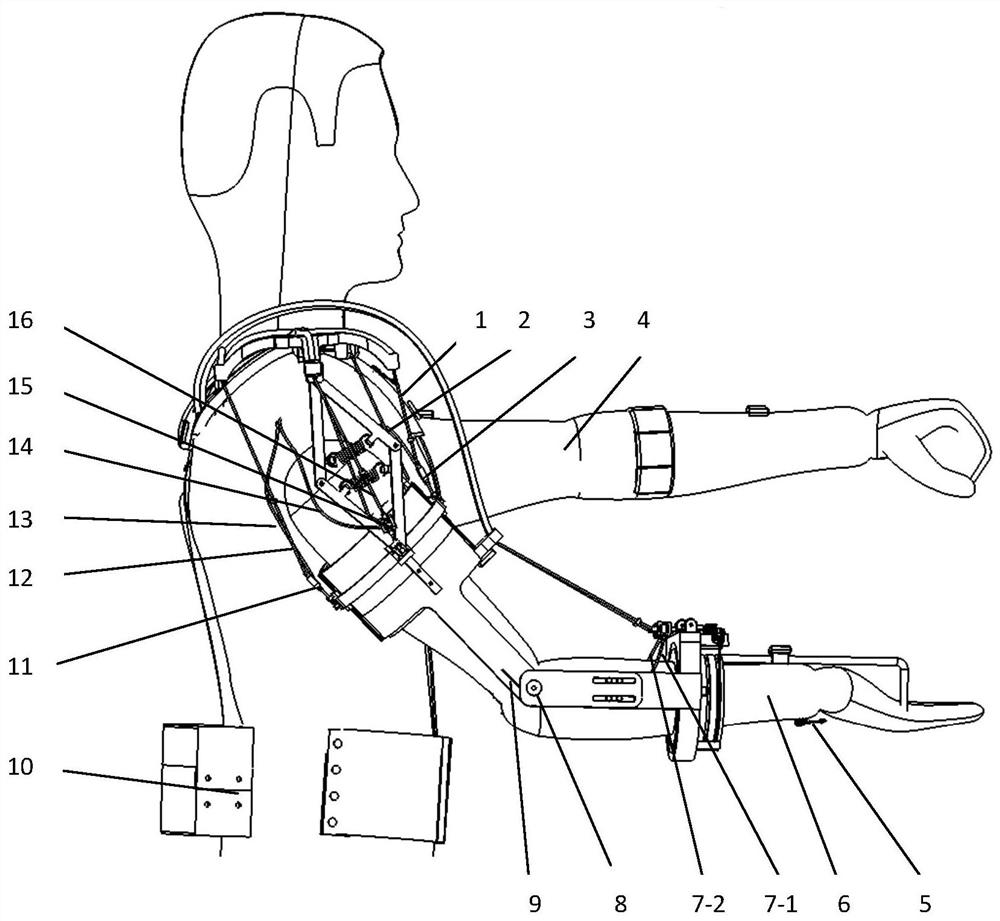
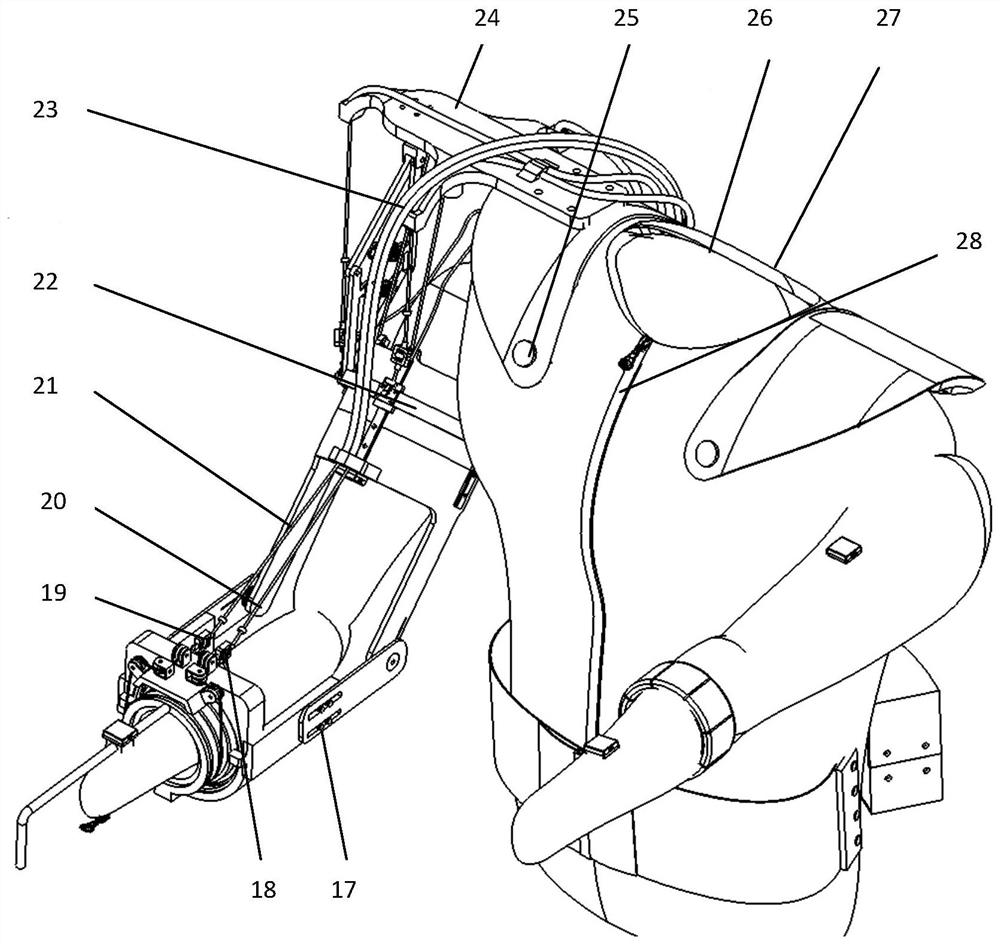
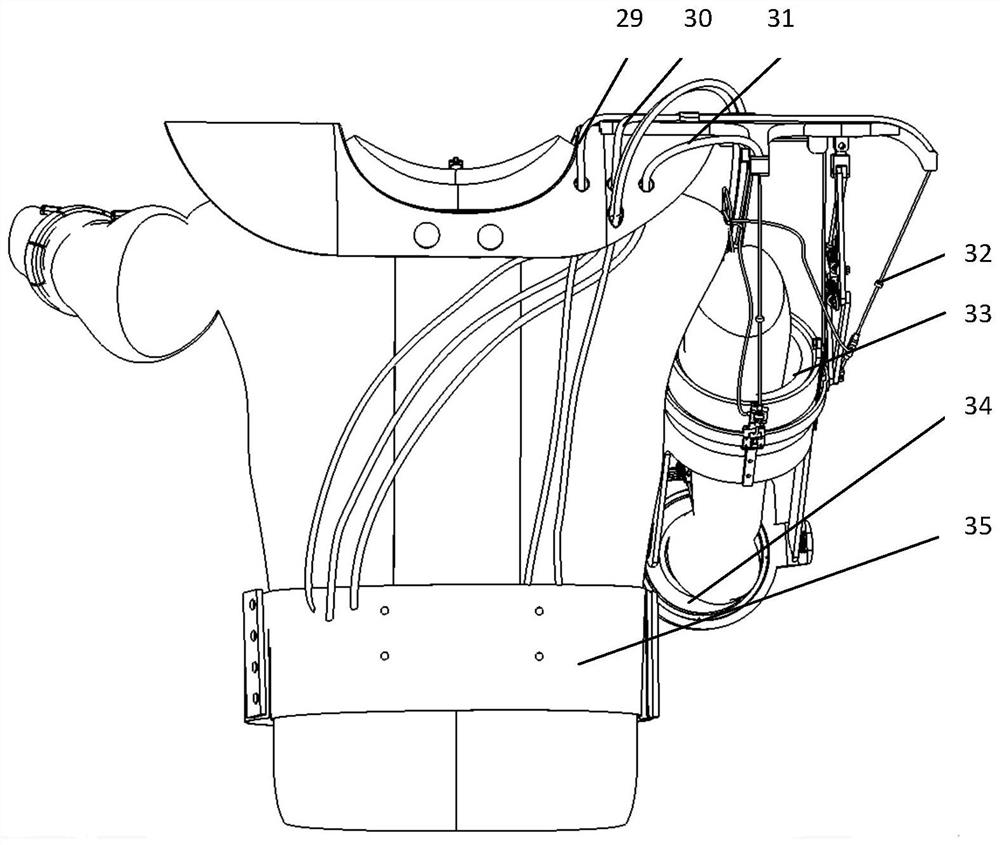
[0060] A portable and wearable upper limb rehabilitation robot, such as Figure 1 to Figure 15 As shown, including special clothing module, wearable flexible actuator module;
[0061] The special clothing module includes a double-layer clothing mechanism, a trunk support mechanism, a shoulder support mechanism, and a drive mechanism; the wearable flexible actuator module includes a gravity balance mechanism, an arm cover mechanism, a force offset mechanism, a Bowden wire transmission mechanism, Tension sensor mechanism;
[0062] The double-layer clothing mechanism is worn on the human body, and is used for providing hidden space for the Bowden cable cover, the power cable, the signal line and the torso support mechanism, and for preventing each component from interfering with the movement of the human body;
[0063] The trunk support mechanism is hidden inside the double-layered clothing mechanism, and is used to support the force on the shoulder of the affected side and main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More