

Unmanned ship path tracking control method and system, storage medium and terminal
A path tracking and control method technology, applied in traffic control system, control/regulation system, vehicle position/route/height control, etc., can solve the problems of limited tracking path and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0035] A method for path tracking control of an unmanned boat provided by an embodiment of the present invention will be described in detail below with reference to the accompanying drawings.
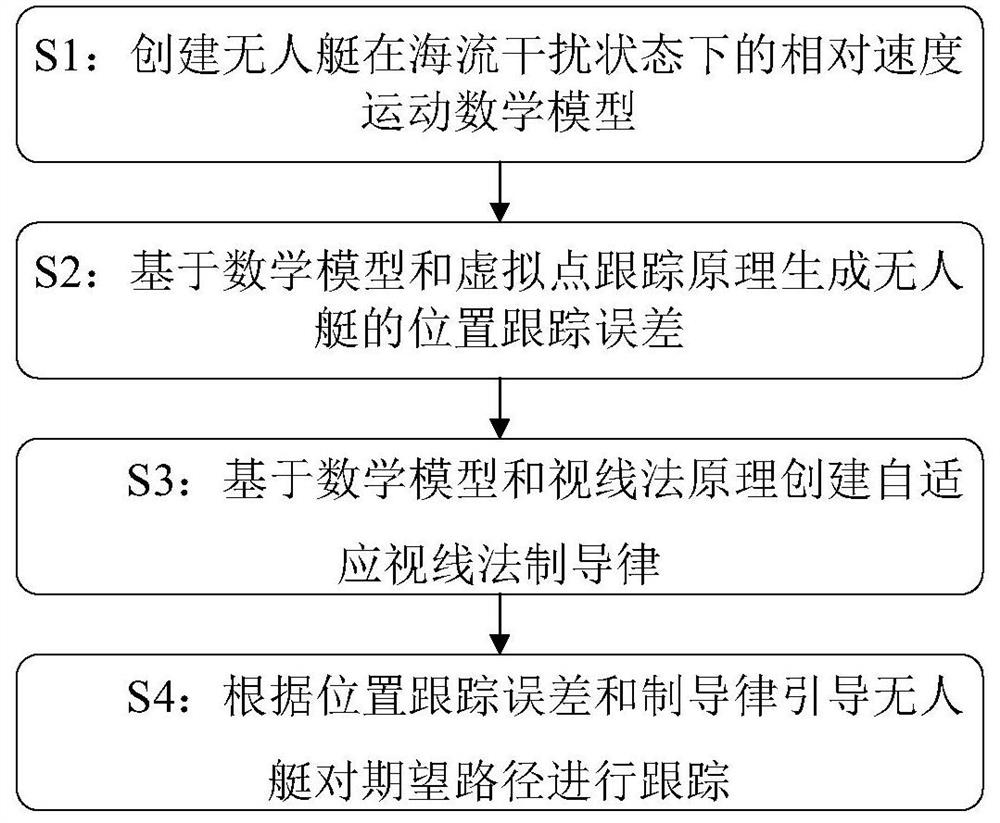
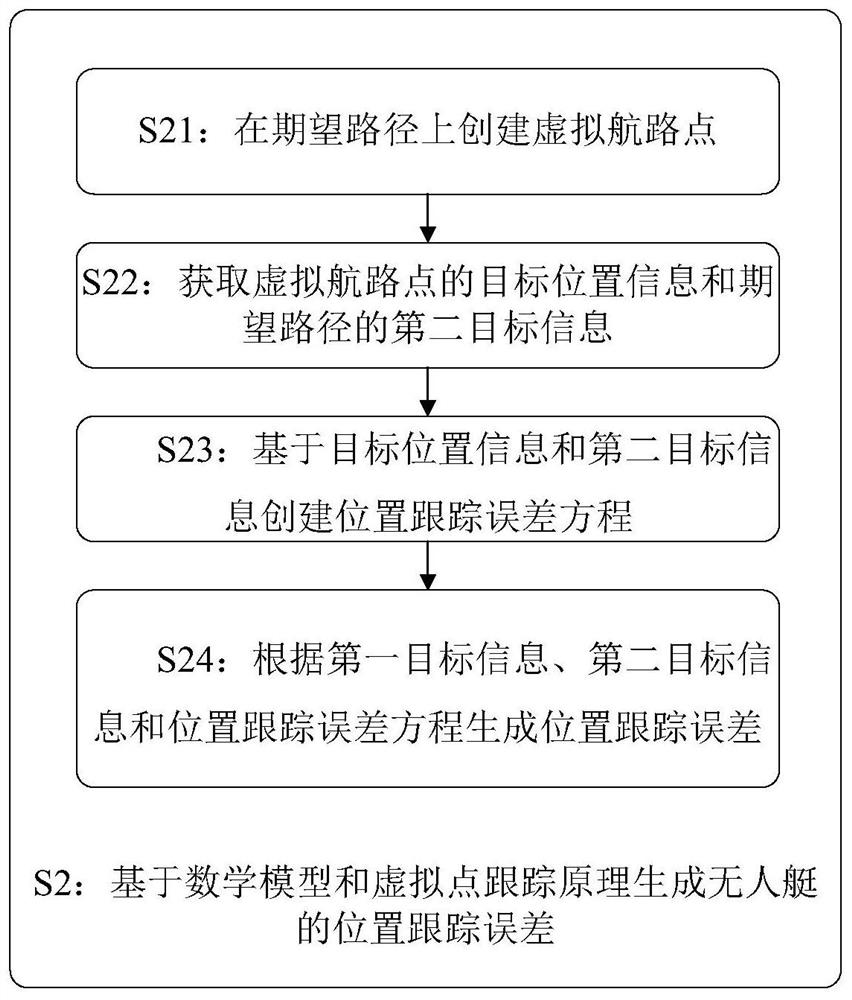
[0036] Figure 1 to Figure 5 It is a flow chart of an unmanned boat path tracking control method according to an embodiment of the present invention. Specifically, see figure 1 , the unmanned boat path tracking control method of the example of the present invention mainly includes the following steps:
[0037] S1: Create a mathematical model of the relative velocity motion of the unmanned boat in the state of ocean current disturbance
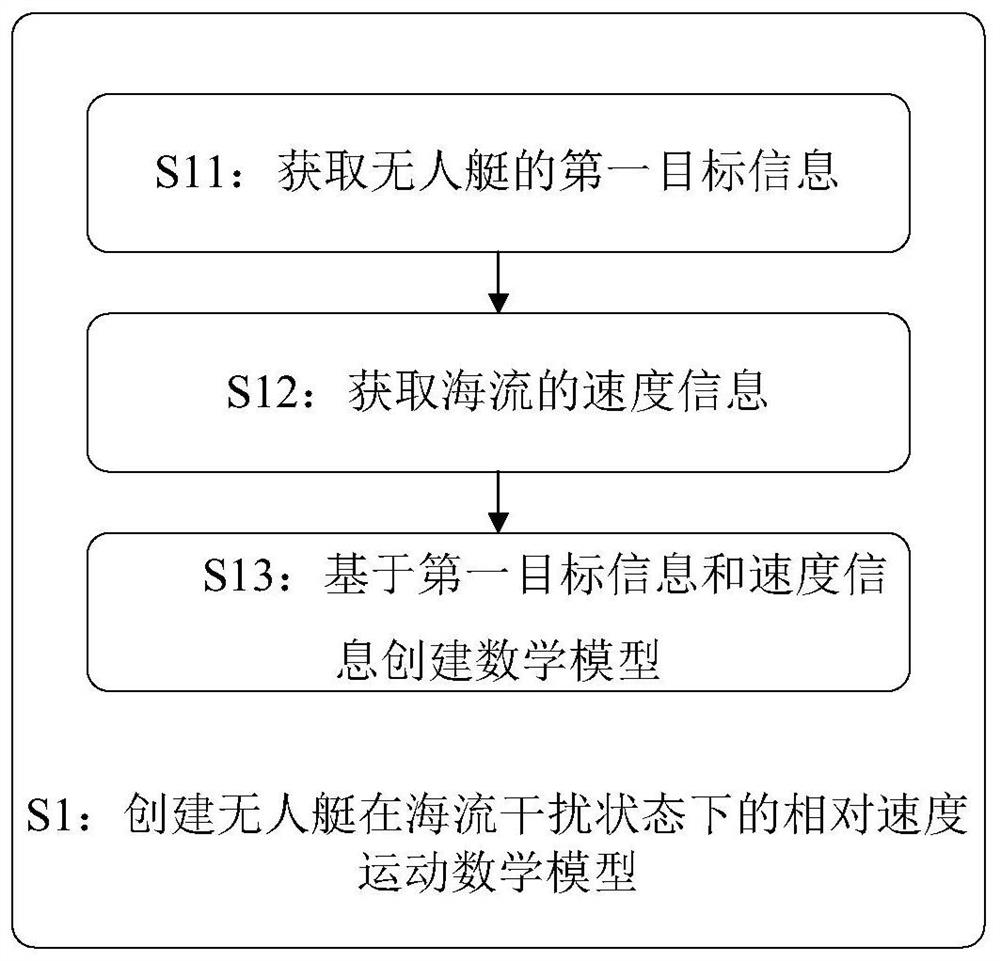
[0038] In some examples, see figure 2 , step S1: creating a mathematical model of the relative velocity motion of the unmanned boat in the state of ocean current disturbance includes the following steps:
[0039] S11: Obtain the first target information of the unmanned vehicle
[0040] Wherein, the first target information includes the hydrodynamic...
Embodiment approach 2
[0108] An embodiment of the present invention also provides a system, which includes a module for executing the steps of the method for controlling the path of the unmanned boat in any one of the embodiments in the first embodiment. Those skilled in the art should understand that the system provided by the present invention has the same beneficial effect as the embodiment in the first embodiment, and details are not repeated here.
Embodiment approach 3
[0110] The embodiment of the present invention also provides a storage medium on which a computer program 11100 is stored, the storage medium is a computer-readable storage medium, and when the program is executed by the processor 12000, the steps of any one of the methods in the first embodiment are implemented . Among them, the computer-readable storage medium may include, but is not limited to, any type of disk, including floppy disk, optical disk, DVD, CD-ROM, microdrive, and magneto-optical disk, ROM, RAM, EPROM, EEPROM, DRAM, VRAM, flash memory device , magnetic or optical cards, nanosystems (including molecular memory ICs), or any type of medium or device suitable for storing instructions and / or data. For the specific execution process, refer to the specific description of the method example in the first embodiment, and details are not repeated here.
[0111] Those skilled in the art should understand that the computer-readable storage medium provided by the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More