Length-adjustable lower limb exoskeleton mechanism
An adjustable exoskeleton technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems affecting the scope of application of lower extremity exoskeleton mechanisms, the overall mass of lower extremity exoskeleton mechanisms, and affecting the use efficiency of lower extremity exoskeleton mechanisms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
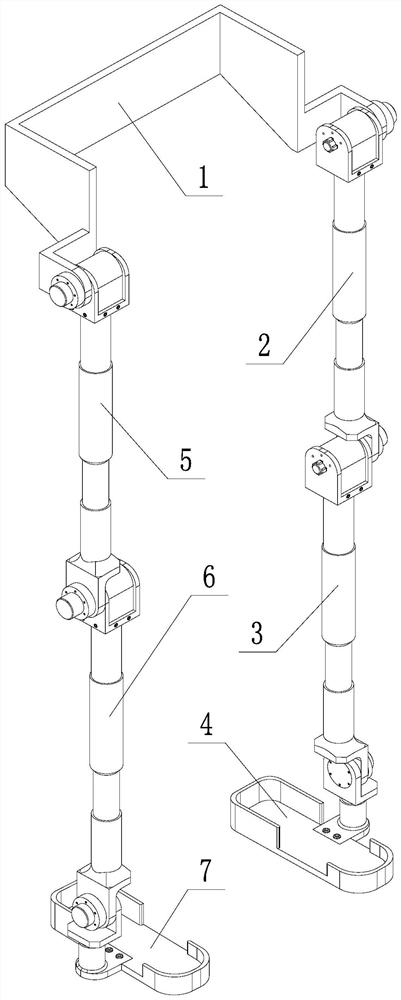
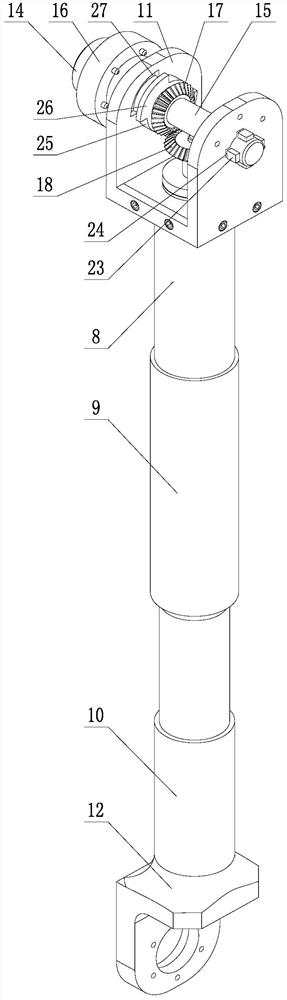
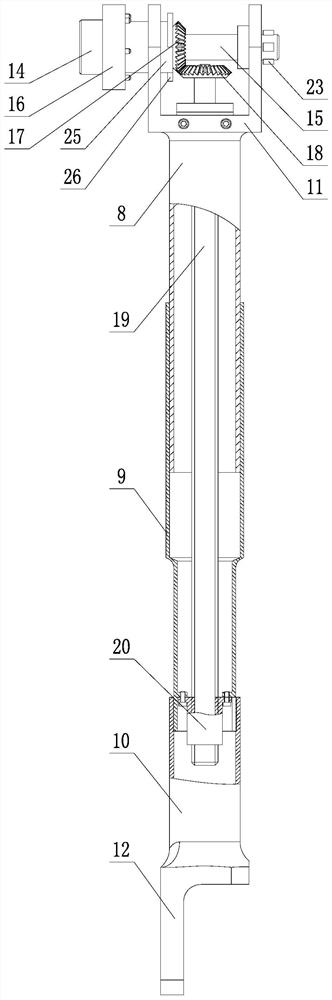
[0017] Such as Figure 1~6As shown, a length-adjustable lower extremity exoskeleton mechanism includes a waist support plate 1, a left thigh bone 2, a left calf bone 3, a left foot support mechanism 4, a right thigh bone 5, a right calf bone 6 and a right foot support mechanism 7 The upper end of the left thigh bone 2 is connected with the left end of the lumbar support plate 1, the lower end of the left thigh bone 2 is connected with the upper end of the left calf bone 3, and the left foot support mechanism 4 is connected with the lower end of the left calf bone 3 The upper end of the right thigh bone 5 is connected with the right end of the lumbar support plate 1, the lower end of the right thigh bone 5 is connected with the upper end of the right calf bone 6, and the right foot support mechanism 7 is connected with the lower end of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More