

Robot polishing method based on multiple sensors
A multi-sensor and robot technology, applied in the field of industrial robot grinding, can solve the problems of low grinding efficiency and difficult quality assurance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
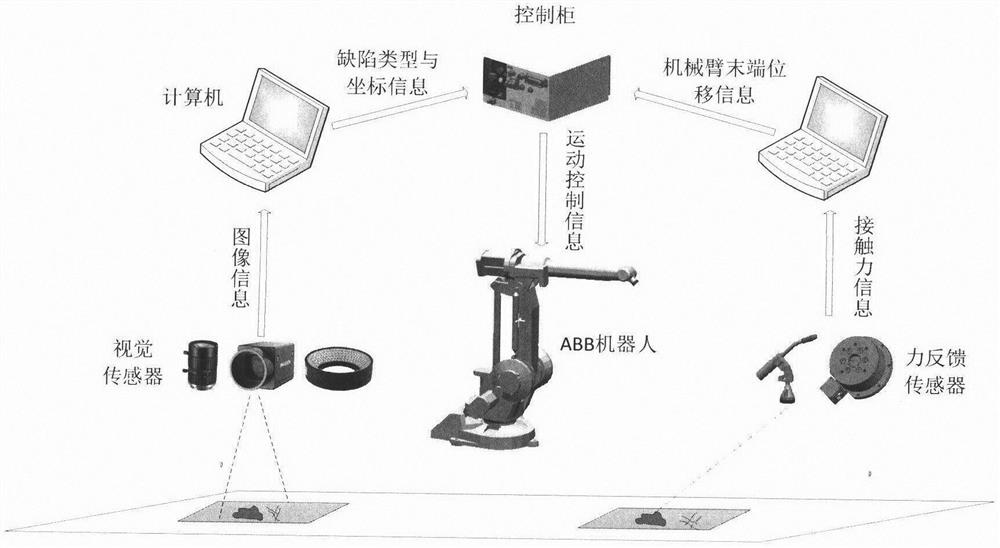
[0027] The present invention has realized a kind of robot grinding method based on multi-sensor through the following steps, and specific implementation steps are as follows:
[0028] Step 1: Select the hardware of the robot grinding system, and at the same time calibrate the hardware components of the visual sensor, including camera calibration, hand-eye calibration and grinding tool calibration, and establish the coordinate transformation relationship between the robot, camera, grinding tool and grinding workpiece ;The camera perspective projection model is used in the camera calibration, the coordinate conversion between each coordinate system is completed, and finally the conversion formula from the world coordinate system to the image coordinate system is obtained:
[0029]
[0030] where f x =f / s x is the image coordinate system u i The normalized focal length of the axis, f y =f / s y for v i axis scale factor, M 1 by f x , f y , u o , v o Four parameters, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More