

Curved surface contour constant force tracking method and application device based on nonlinear double closed-loop control
A double closed-loop control, surface contour technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems of complex mechanical structure, accuracy interference or noise, etc., to achieve the effect of simple, effective and easy to implement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
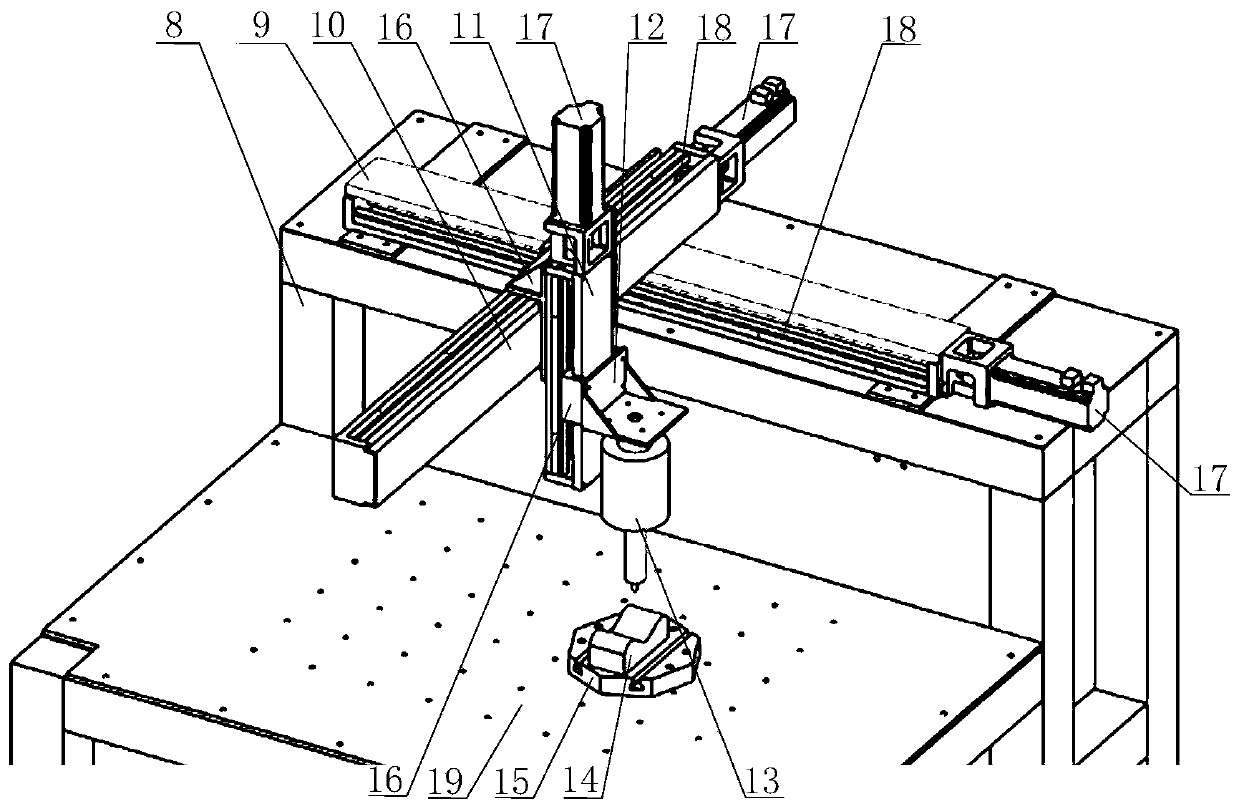
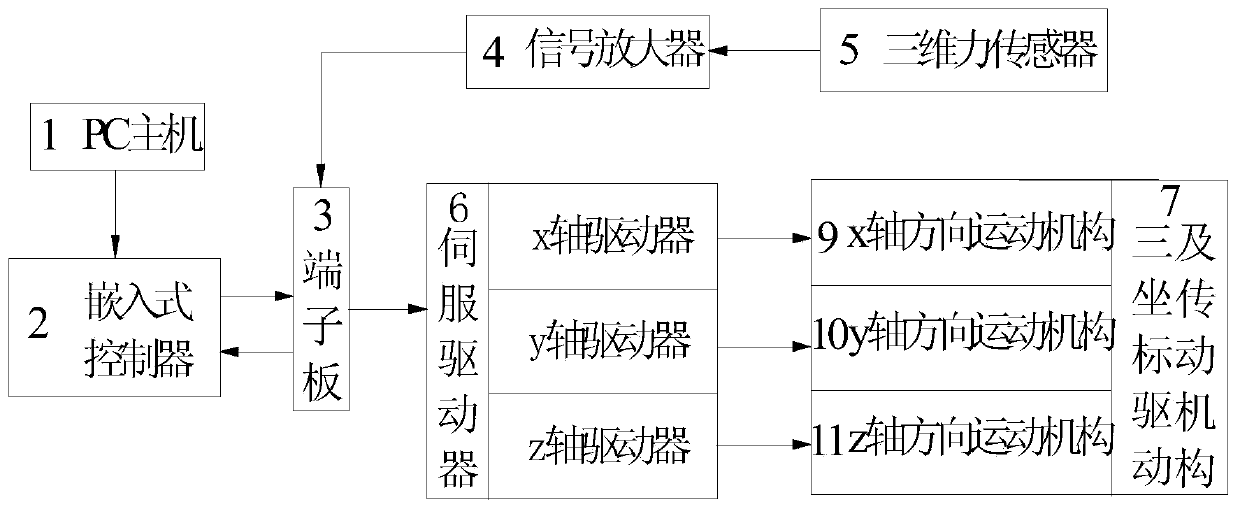
[0045] Realize the application device of the present invention based on the nonlinear double-closed-loop control surface contour constant force tracking method, such as figure 1 and figure 2As shown, it mainly includes the control part and the mechanical part; the control part includes: PC host 1, embedded motion controller 2, terminal board 3, signal amplifier 4, three-dimensional force sensor 5, servo driver 6, and the mechanical part includes: three Coordinate drive and transmission mechanism 7, workbench 8, sensor clamping frame 12, processing tool 13, workpiece fixture 15 for clamping curved surface workpiece 14.
[0046] The three-coordinate drive and transmission mechanism 7 of the present invention is composed of three direction motion mechanisms of x-axis, y-axis and z-axis respectively. On the ball slider 16 of the motion mechani...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More