

Multi-terminal in-loop virtual-real combined traffic comprehensive scene simulation test system and method
A virtual-real combination and scene simulation technology, which is applied in the field of multi-terminal in-loop and virtual-real combined traffic comprehensive scene simulation test system, can solve the difficulty of interpenetration of experimental data and conclusions, desalination of the adsorption of the real test environment, and the lack of correlation of non-loop units sexual issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
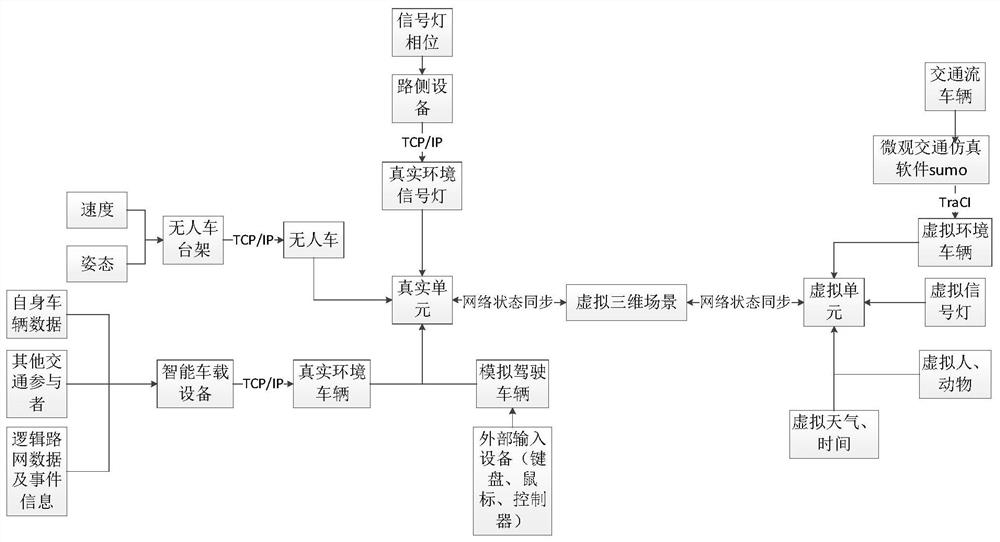
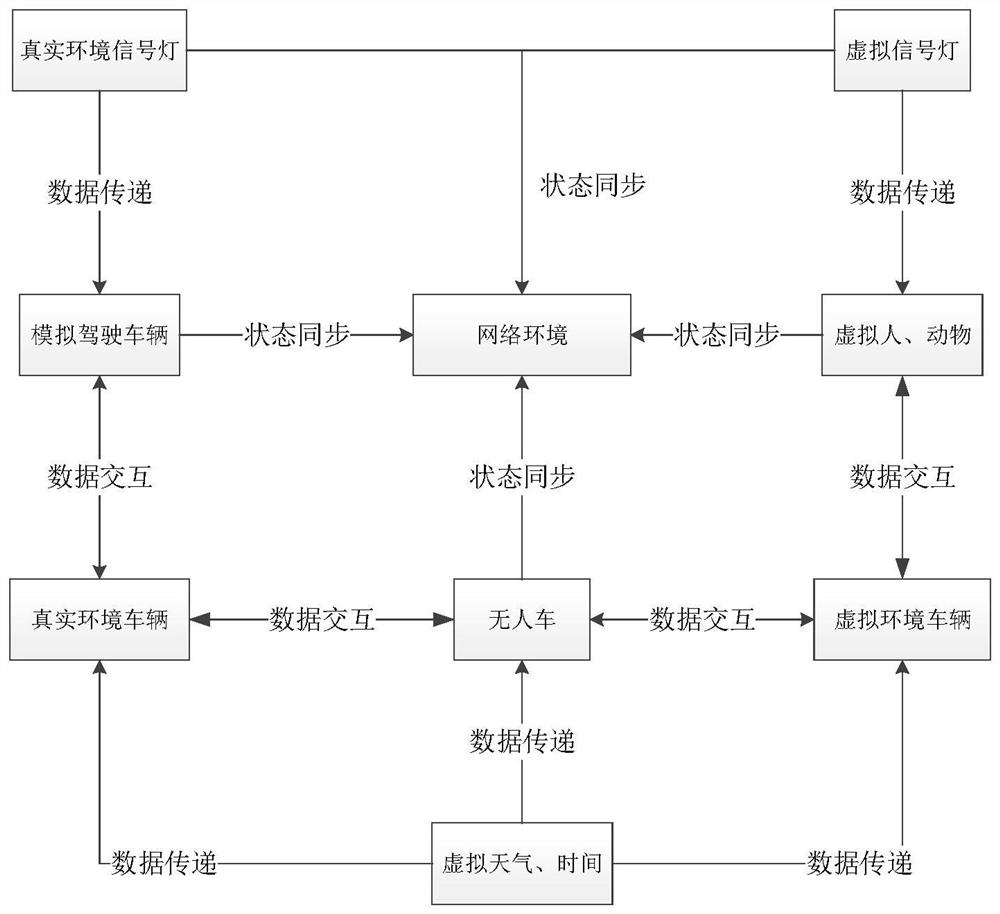
[0052] Such as figure 1 with figure 2 As shown, this embodiment provides a multi-terminal in-the-loop combined virtual and real traffic comprehensive scene simulation test system, including: a virtual unit, a real unit and a network environment; the virtual unit and the real unit are jointly connected to the network environment to realize data interaction between modules and response and real-time feedback of results;
[0053] Virtual units include:
[0054] The simulation scene building module is used to establish a virtual three-dimensional scene and realize the reconstruction of the traffic scene;
[0055] The logical road network environment establishment module is used to establish a descriptive and identifiable road with standard specifications and its geometric parameters (slope, height, road width), road surface, etc. Attributes (road conditions, materials), intersections, lanes (number of lanes, lane markings), signal lights, sign boards, traffic flow, roadside ob...
Embodiment 2
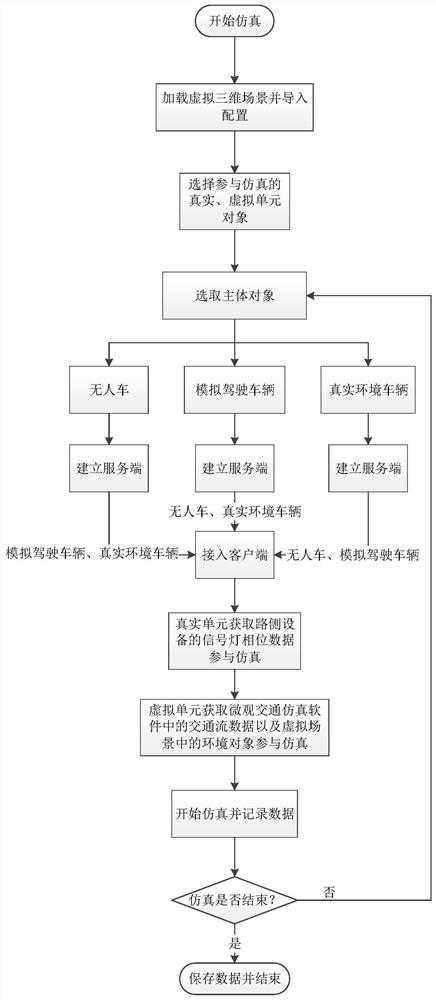
[0074] This embodiment provides a multi-device-in-the-loop simulation test method for combined virtual and real traffic scenarios, including the following steps:
[0075] Step 1: Start the simulation platform, load the virtual 3D scene, and import the prefabricated configuration;
[0076] Step 2: Select the real unit and virtual unit objects that need to participate in the simulation test, and select one of them as the main object;
[0077] Step 3: The real unit obtains the vehicle heading angle, speed, and position data from the simulated driving, which is used to drive the corresponding simulated driving vehicle in the scene, and at the same time transmits it to the network environment, and performs state synchronization corresponding to the simulated driving vehicle;
[0078] Step 4: The real unit obtains the vehicle attitude and speed data from the unmanned vehicle on the bench, which is used to drive the corresponding unmanned vehicle in the scene, and at the same time tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More