

An integrated chassis control method for four-wheel drive electric vehicles
A technology of electric vehicles and four-wheel drive, applied in the direction of control devices, combustion engines, internal combustion piston engines, etc., to achieve the effects of strong maneuverability, good real-time performance, and guaranteed coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0129] An integrated chassis control method for a four-wheel drive electric vehicle, the method comprising the following steps:
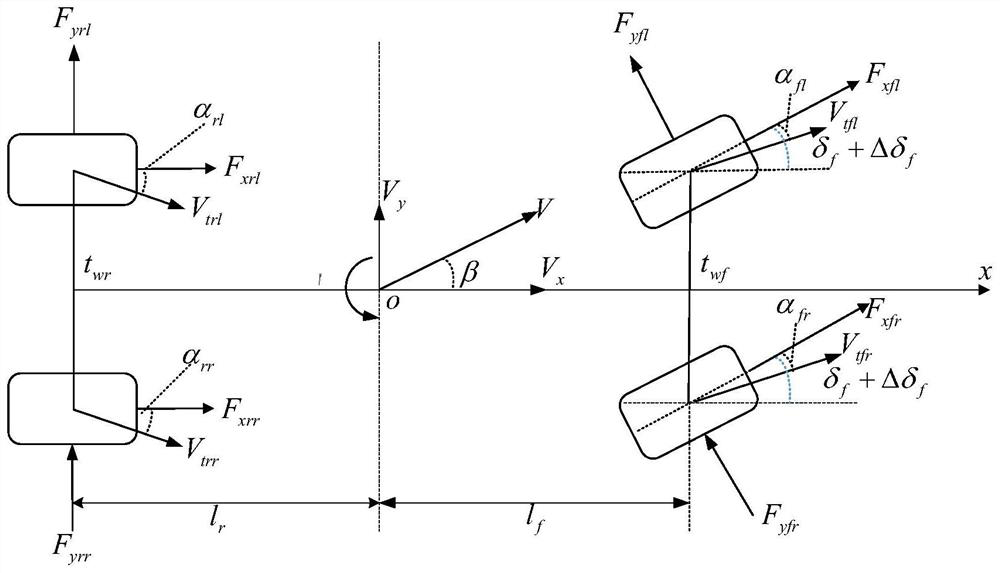
[0130] Step 1. In order to determine the relevant state quantities that affect the lateral stability of the vehicle, based on the four-wheel linear two-degree-of-freedom vehicle model of the body motion plane, the vehicle steering and acceleration motion states are analyzed, and the active front wheel steering, direct The yaw moment is used as the control input, and the side slip angle and yaw rate of the vehicle are regarded as state variables, and the influence of front wheel active steering and yaw moment on vehicle stability is analyzed;
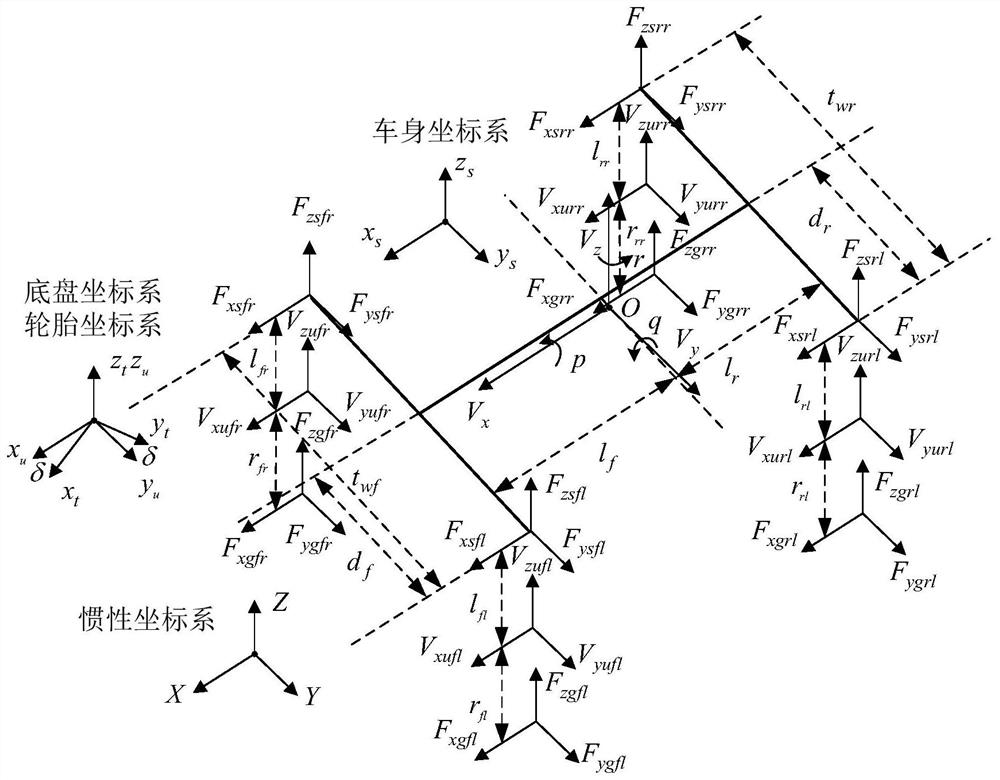
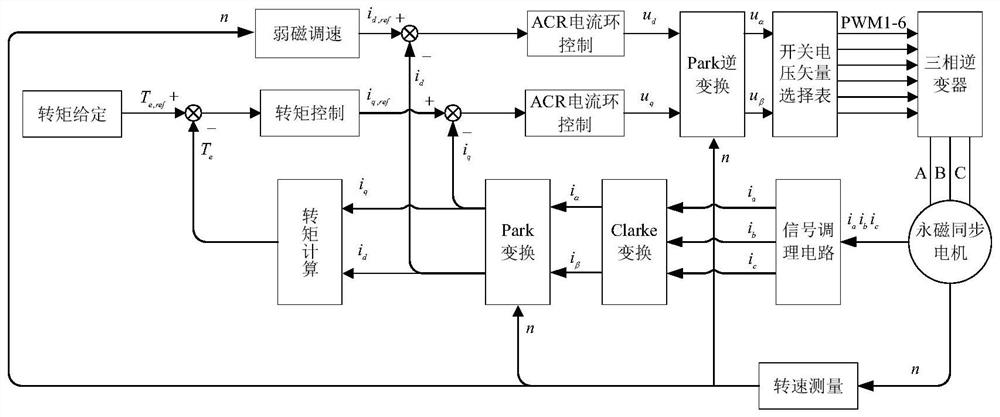
[0131] Step 2. For the researched integrated chassis control of four-wheel drive electric vehicles, use relevant dynamic models, including 14 degrees of freedom vehicle model, permanent magnet synchronous motor control model and driver model, and conduct model verification based on the above models ;
[0132]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More