

Ordered point cloud 5D texture grid data structure generation method, device, equipment and medium
A grid data and point cloud data technology, applied in image data processing, 3D modeling, instruments, etc., can solve the problems of difficult to adapt to accurate stacking, difficult to adapt, huge template workload, etc., to achieve precise grasping and stacking, The effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
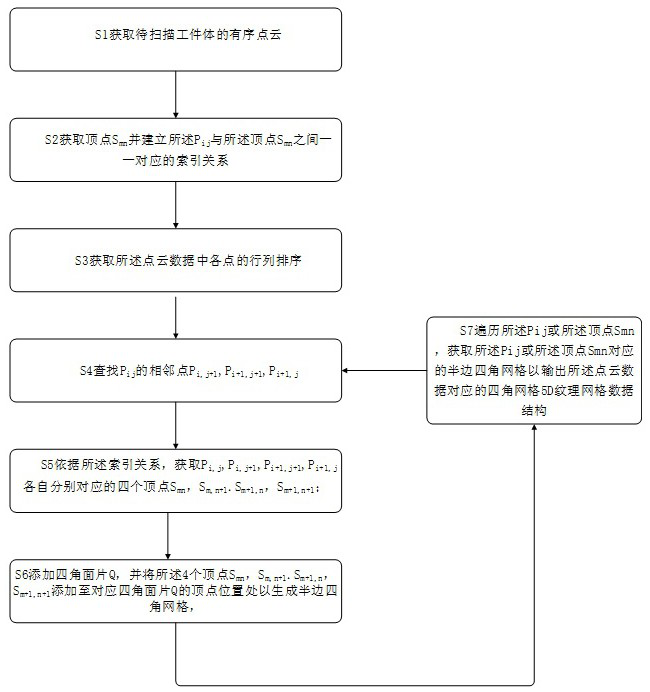
[0049] Such as figure 1 As shown, the application provides a method for generating a 5D texture grid data structure of a 3D ordered point cloud, including:
[0050] S1 obtains the ordered point cloud data of the object to be detected.
[0051] In this embodiment, the original ordered point cloud of the object to be detected is acquired based on a 3D camera, wherein the point cloud data is recorded in the form of points for the object to be detected, and each point contains three-dimensional coordinates including color information and normal vectors. More specifically, the color information is usually acquired by the camera, and then the color information of the pixel at the corresponding position is assigned to the corresponding point in the point cloud; the ordered point cloud is generally in the camera coordinate system, and the normal is facing the camera .
[0052] S2 For any point P in the ordered point cloud ij , adding the P ij And the corresponding 3D position coo...
Embodiment 2
[0070] Such as Figure 5 As shown, the present application also provides a 5D texture grid data structure generation device 10 of a 3D ordered point cloud, including:
[0071] The ordered point cloud acquisition module 11 is used to acquire the ordered point cloud data of the workpiece to be scanned;
[0072] Mapping relationship establishment module 12, for any point P in the ordered point cloud ij , adding the P ij And the corresponding 3D position coordinates (x, y, z) normal vector, color information to obtain the vertex S mn information and build the P ij with the S mn One-to-one correspondence between;
[0073] Row and column sorting acquisition module 13, used to acquire each point P in the point cloud data ij row and column sorting;
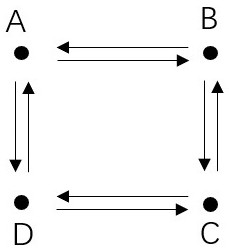
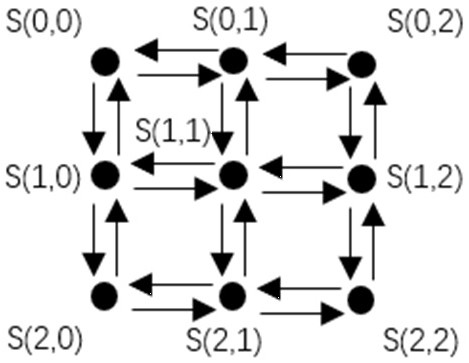
[0074] Adjacent point search module 14, for any point P in the ordered point cloud ij , find P according to the index rules sorted by row and column ij Neighboring point P i,j+1 ,P i+1,j+1 ,P i+1,j , wherein, in the point clou...
Embodiment 3
[0085] Image 6 It is a schematic structural diagram of a computer device provided by an embodiment of the present invention, such as a smart phone, a tablet computer, a notebook computer, a desktop computer, a rack server, a blade server, a tower server, or a cabinet server (including independent server, or a server cluster composed of multiple servers), etc. The computer device 20 in this embodiment at least includes but is not limited to: a memory 21 and a processor 22 that can be communicatively connected to each other through a system bus, as shown in FIG. X . It should be pointed out that, Image 6 Only computer device 20 is shown having components 21-22, but it should be understood that implementing all of the illustrated components is not a requirement and that more or fewer components may instead be implemented.
[0086] In this embodiment, the memory 21 (that is, a readable storage medium) includes a flash memory, a hard disk, a multimedia card, a card-type memory (f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More