

Reverse scanning stability compensation method adopting staring type detector photoelectric search system
A technology for searching systems and compensation methods, applied in radio wave measurement systems, optics, instruments, etc., to achieve the effect of improving system stability, accuracy, high-precision characteristics, and simple logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
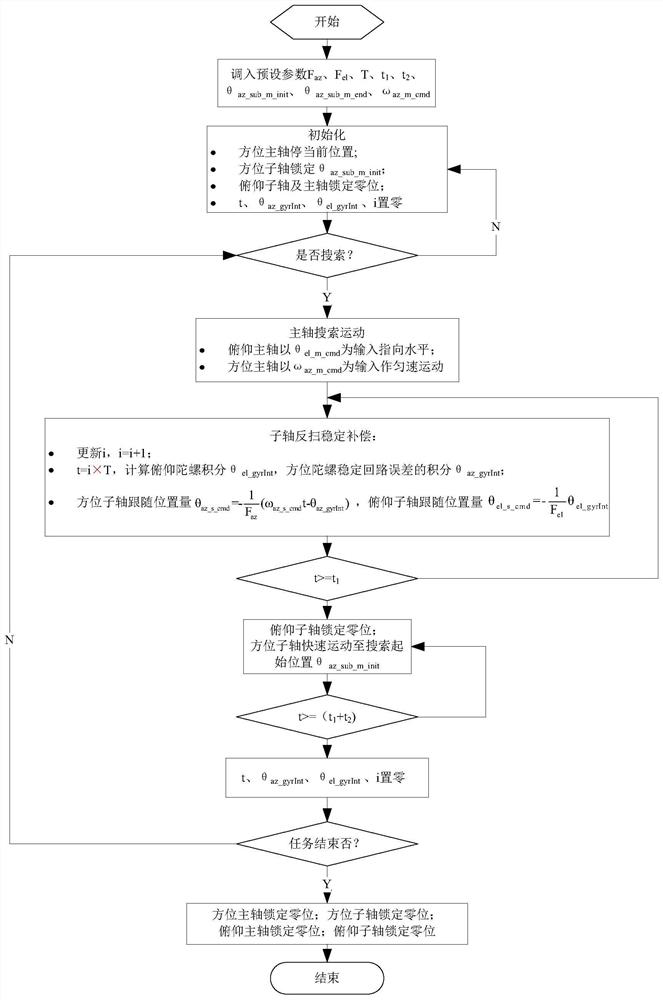
[0092] In this embodiment, the prerequisites for realizing the anti-scanning stability compensation method using the staring detector photoelectric search system under the motor base of the photoelectric equipment are as follows:
[0093] 1. Angular gain F of the sub-axis angular displacement in azimuth and pitch relative to the main axis detection optical system az , F el Has been determined; in this preferred embodiment F az = 2,,
[0094] 2. The running cycle T of the servo control software and the staring time t 1 , reset time t 2 , Azimuth spindle search movement speed ω az_m_cmd , Azimuth sub-axis anti-sweep compensation starting position θ az_sub_m_init , Azimuth sub-axis anti-sweep compensation end position θ az_sub_m_end It has been determined; in this preferred embodiment: T=0.5ms, t 1 = 10ms, t 2 = 10ms, ω az_m_cmd =180° / s, θ az_sub_m_init =0.9°, θ az_sub_m_init =-0.9°.
[0095] 3. The spindle gyro stabilization circuit of the azimuth and pitch composi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More