MPC-based intelligent vehicle path tracking control method and system
An intelligent vehicle and path tracking technology, applied in vehicle position/route/altitude control, control/adjustment system, two-dimensional position/channel control, etc. Control requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
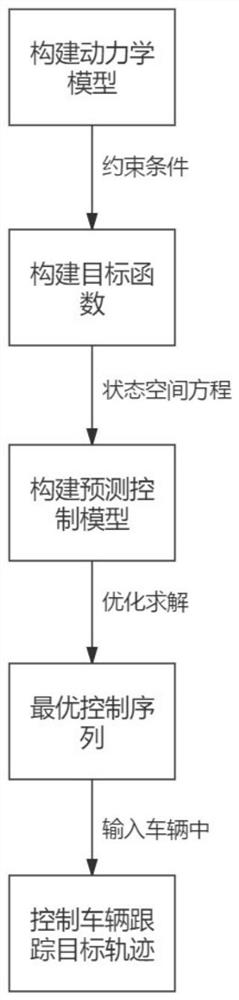
[0052] refer to Figure 1 to Figure 6 , is the first embodiment of the present invention, this embodiment provides a kind of MPC-based intelligent vehicle path tracking control method, comprising:
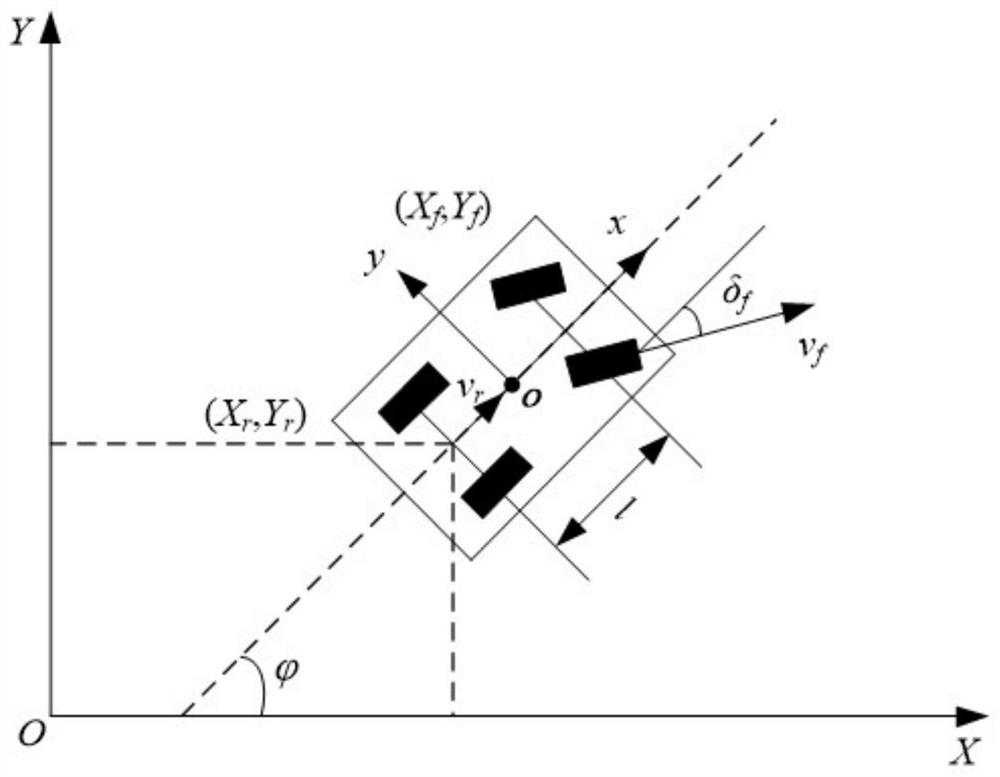
[0053] S1: Establish a three-degree-of-freedom dynamic model based on the structure of the physical intelligent vehicle and analyze it to obtain the geometric constraints that meet the vehicle's motion. It should be noted that, referring to figure 2 , to establish a three-degree-of-freedom dynamic model, including:
[0054] Establish the xoy coordinate system according to the structure of the physical intelligent vehicle, define the x-axis perpendicular to the vehicle axis and pointing to the forward direction of the vehicle, and the y-axis starting from the center of mass of the vehicle and parallel to the vehicle axis;
[0055] According to the kinematic constraints of the front and rear of the vehicle, the following equations are obtained,
[0056]
[0057] Among them, (X...
Embodiment 2
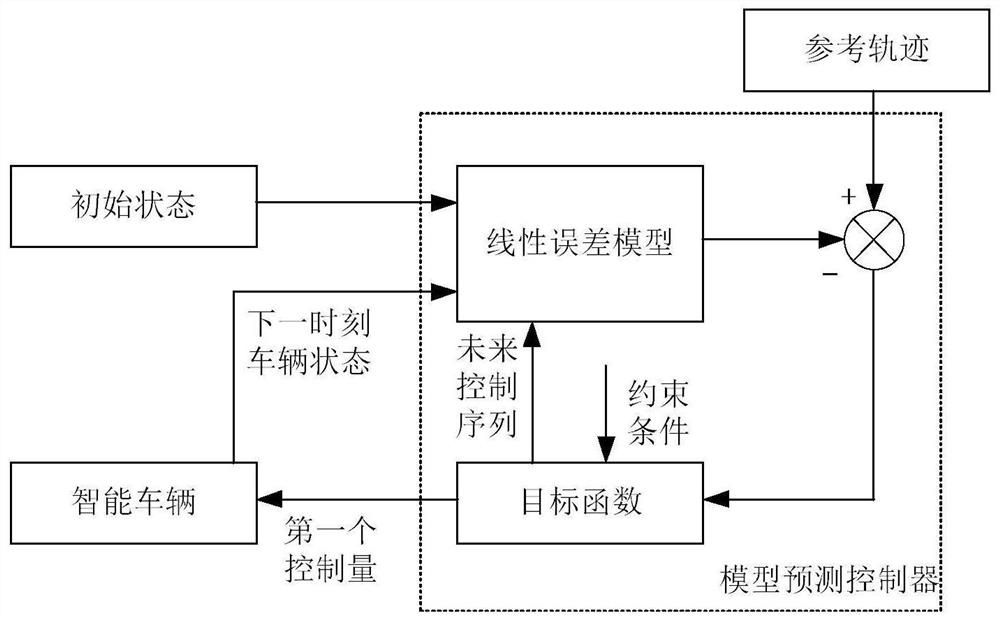
[0154] refer to Figure 7 , which is the second embodiment of the present invention, this embodiment is different from the first embodiment in that it provides a MPC-based intelligent vehicle path tracking control system, including:
[0155] The perception module 100 is used to collect real-time data of the external environment and various power parameters of the intelligent vehicle while driving.
[0156] The decision-making module 200 is connected to the perception module 100, and it is used to receive and process the data information of the perception module 100. The decision-making module 200 includes a calculation unit 201, a storage unit 202 and an input-output management unit 203. The calculation unit 201 is used to construct an objective function and an equation, model, calculate and process various operational data, obtain the calculation results to generate decisions, the storage unit 202 is used to store the data information received and processed by the decision-ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More