

Three-dimensional laser radar navigation method and equipment in glass scene based on deep learning
A three-dimensional laser and radar navigation technology, applied in the field of mobile robot navigation, can solve problems such as matching laser radar data with maps, inability to obtain glass information, and glass perception confusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
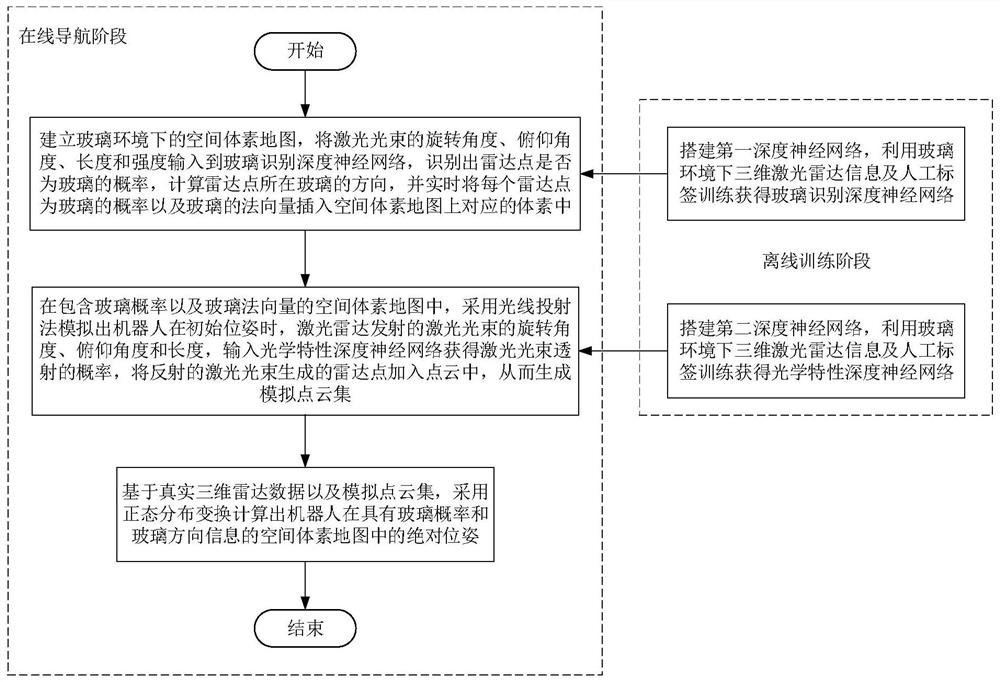
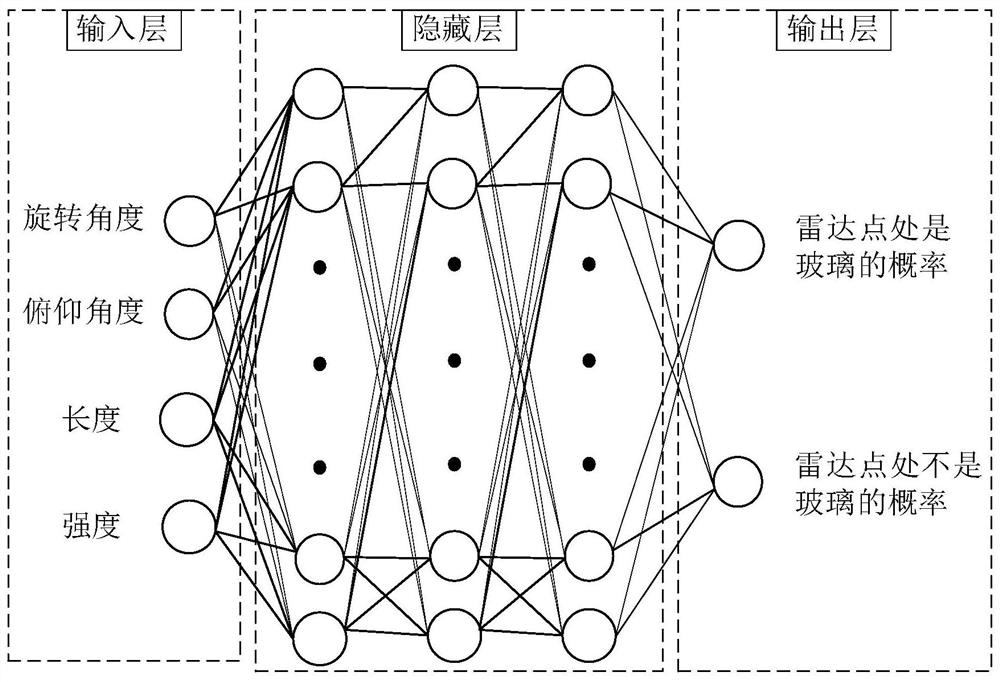
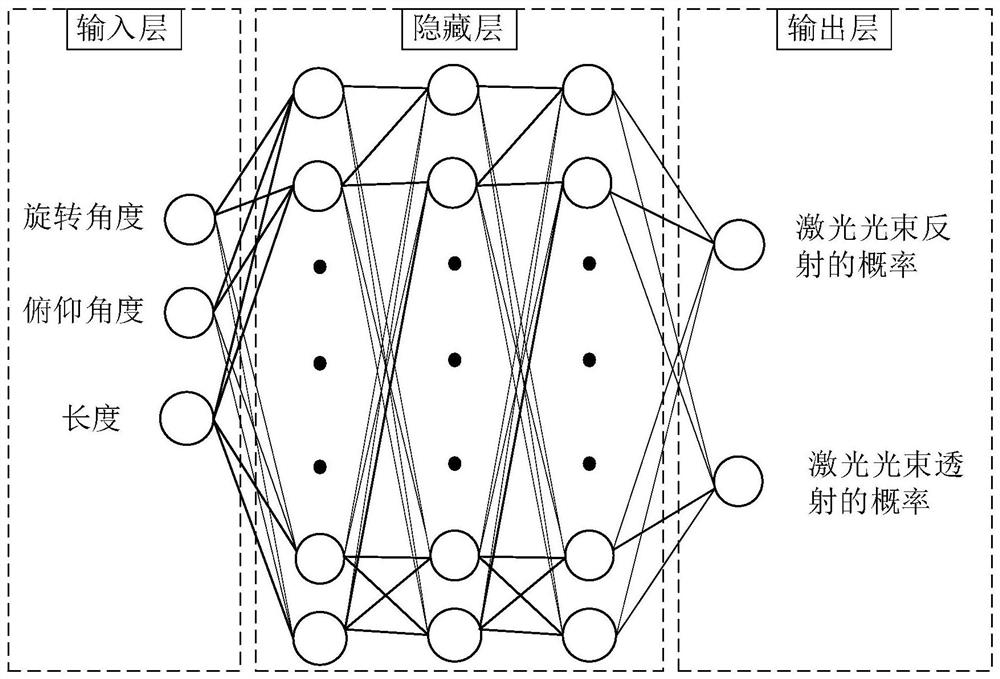
[0085] figure 1 The implementation flow of the entire navigation algorithm in the present invention is shown: in the offline training stage, it is necessary to build and train the deep neural network for glass recognition and the optical characteristic deep neural network, while in the online navigation stage, it is necessary to build a spatial voxel map under the glass environment, and real-tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More