

A pixel-level target location method based on fusion of laser and monocular vision
A monocular vision, target positioning technology, applied in the direction of using optical devices, instruments, measuring devices, etc., can solve the problem of computing resource consumption, object positioning accuracy, effective positioning distance and cost, limited computing power of terminal computing equipment, and difficult objects. positioning and other problems, to achieve the effect of improving autonomous operation ability, ensuring real-time positioning, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
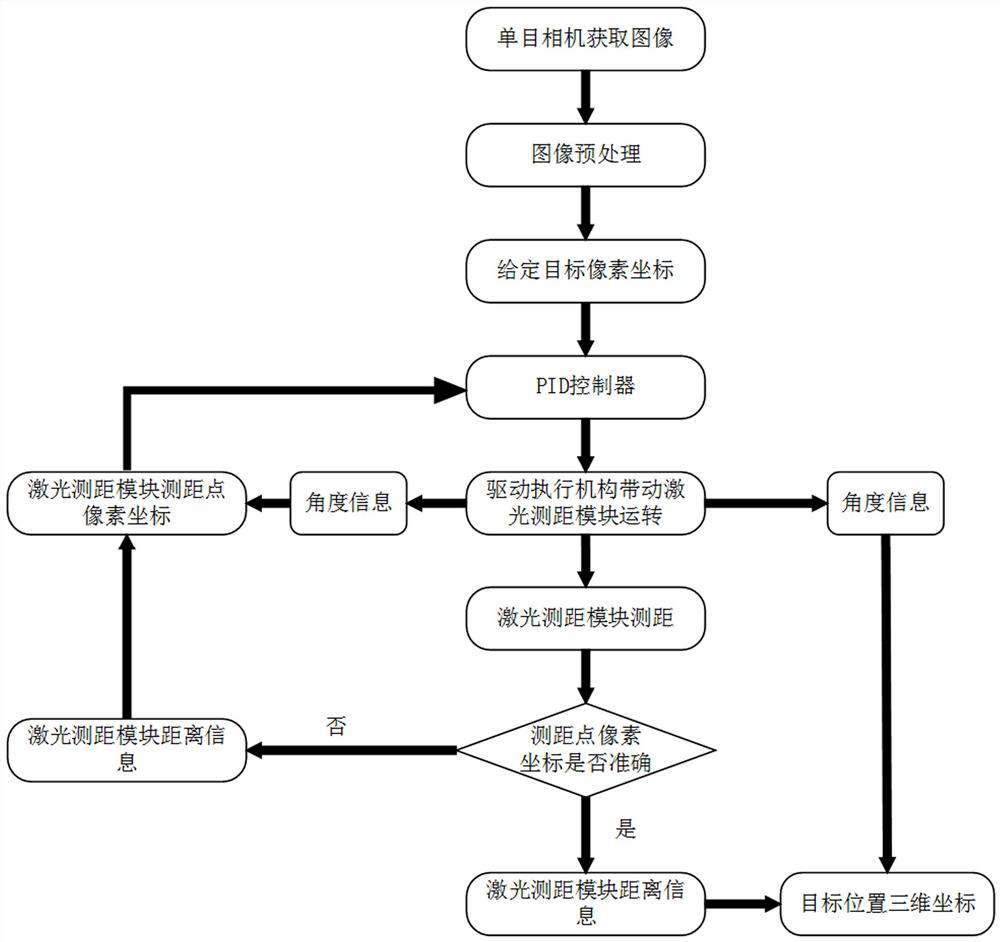
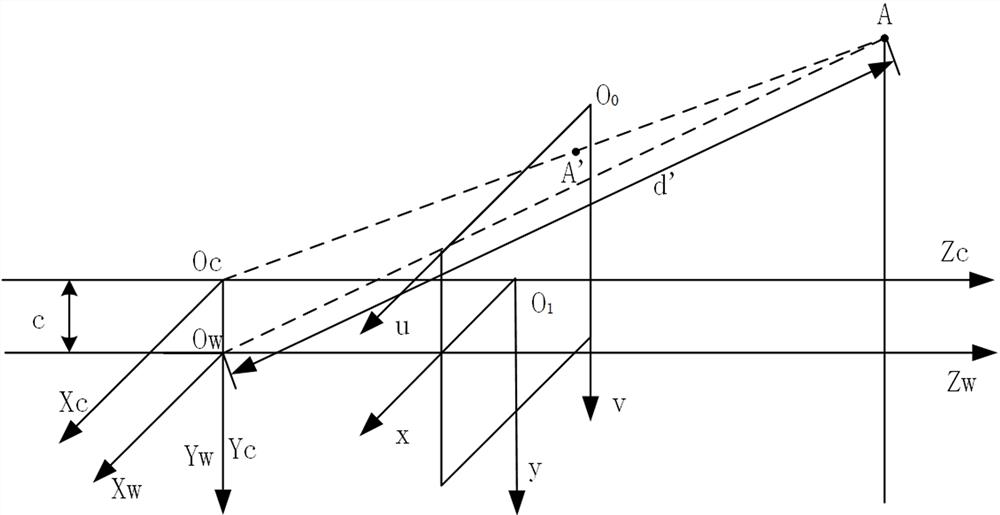
[0031] like Figure 1-2 As shown, a pixel-level target positioning method based on laser and monocular vision fusion of the present invention includes the following steps:
[0032] S1. The installation position of the camera ensures that the optical axis of the camera is parallel to the ground. The installation position of the laser ranging module ensures that the line connecting the optical center of the laser ranging module and the optical center of the camera is perpendicular to the ground and makes the vertical distance between the laser ranging module and the monocular camera spacing as small as possible, where O W x W Y W Z W The coordinate system of the laser ranging module is the world coordinate system of this system, O C x C Y C Z C is the camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More