

An intelligent fruit and vegetable picking device and picking method
A fruit and vegetable and walking device technology, applied in the field of robots, can solve the problems of reduced picking operation efficiency, poor adaptability, inaccurate identification and positioning, etc., to improve adaptability, stability and safety of walking, and improve efficiency and success rate , reduce the possible effect of damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
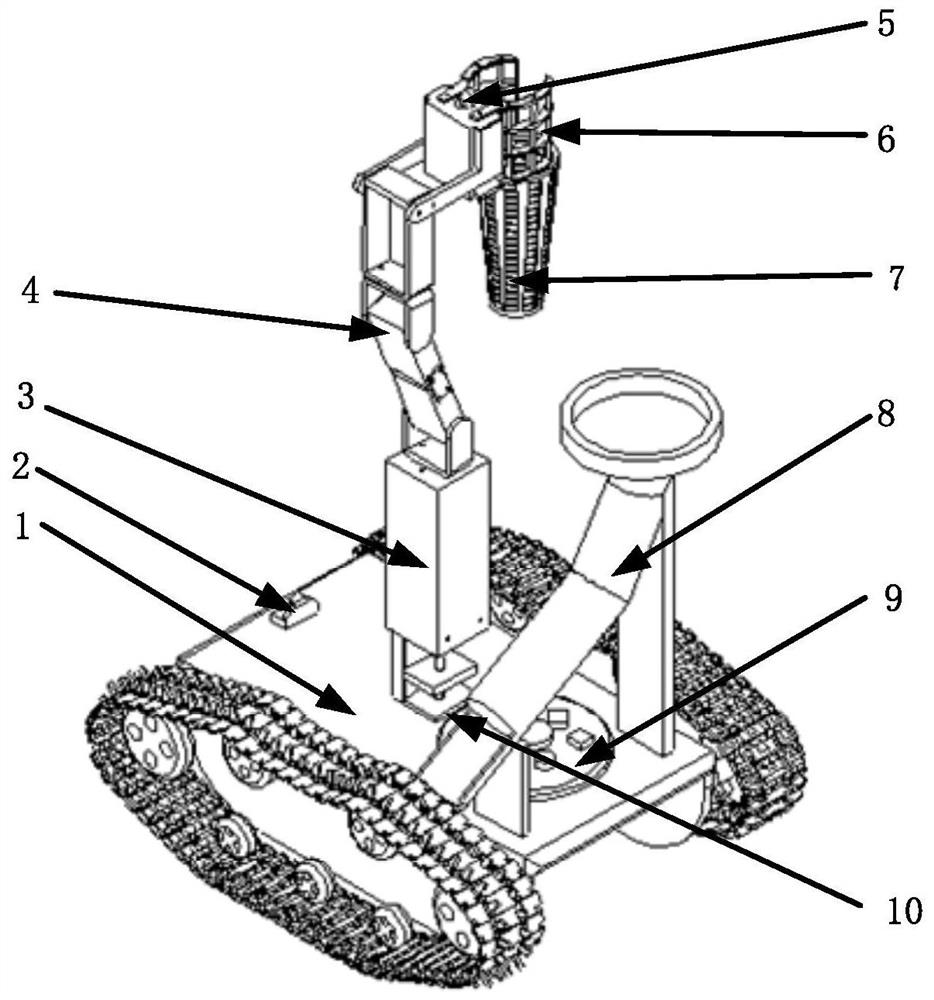
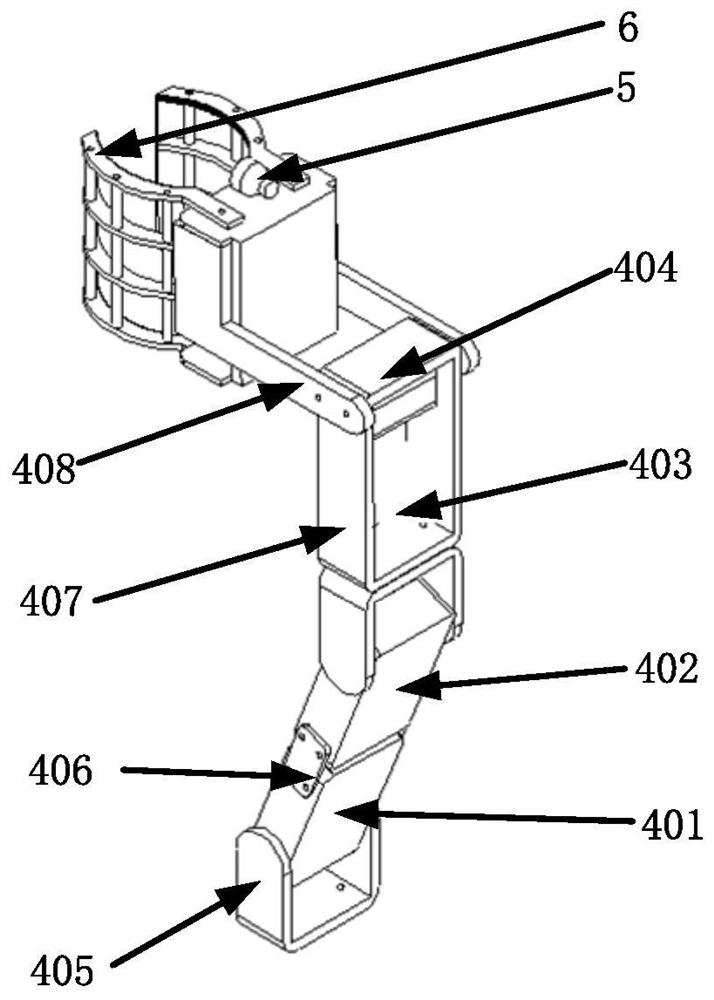
[0033] Depend on Figure 1 to Figure 5 As shown, an intelligent fruit and vegetable picking device includes a walking device 1 , a lifting platform 3 , a mechanical arm 4 , an end effector, a transmission device 8 , a visual device and a control device 9 .
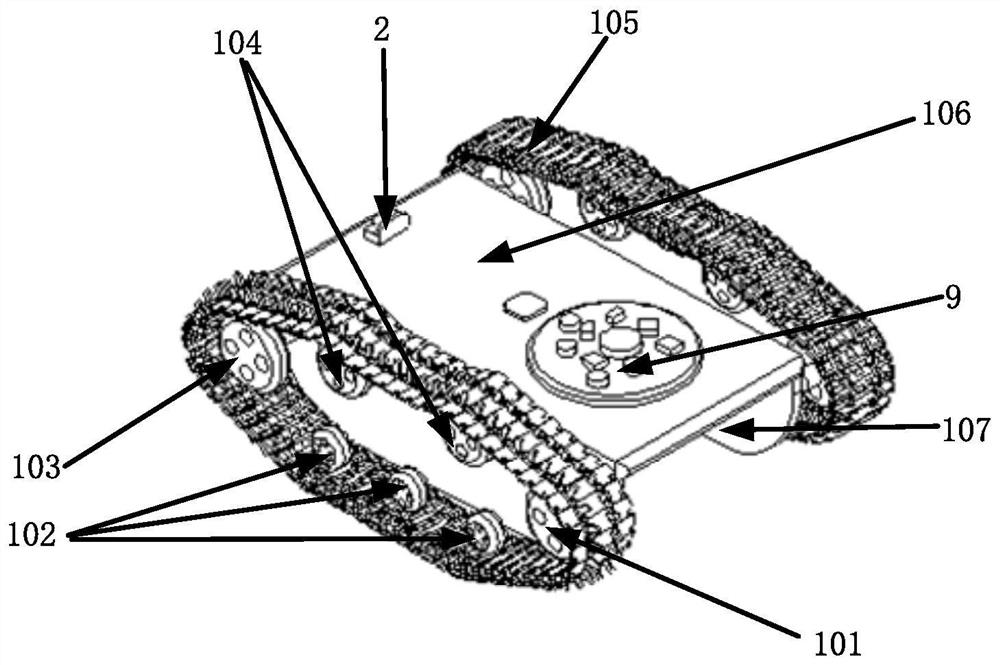
[0034] Described running device comprises chassis 106 and driving motor 107, and the both sides of chassis 106 are respectively equipped with a guide wheel 101, a driving wheel 103, two supp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More