

Multi-unmanned aerial vehicle task scheduling method and system and storage medium
A task scheduling and multi-drone technology, applied to mechanical equipment, combustion engines, computer components, etc., can solve the problems of slow solution speed, low solution quality, weak connection, etc., and achieve a small gap in the number of tasks and reduce consumption the effect of time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
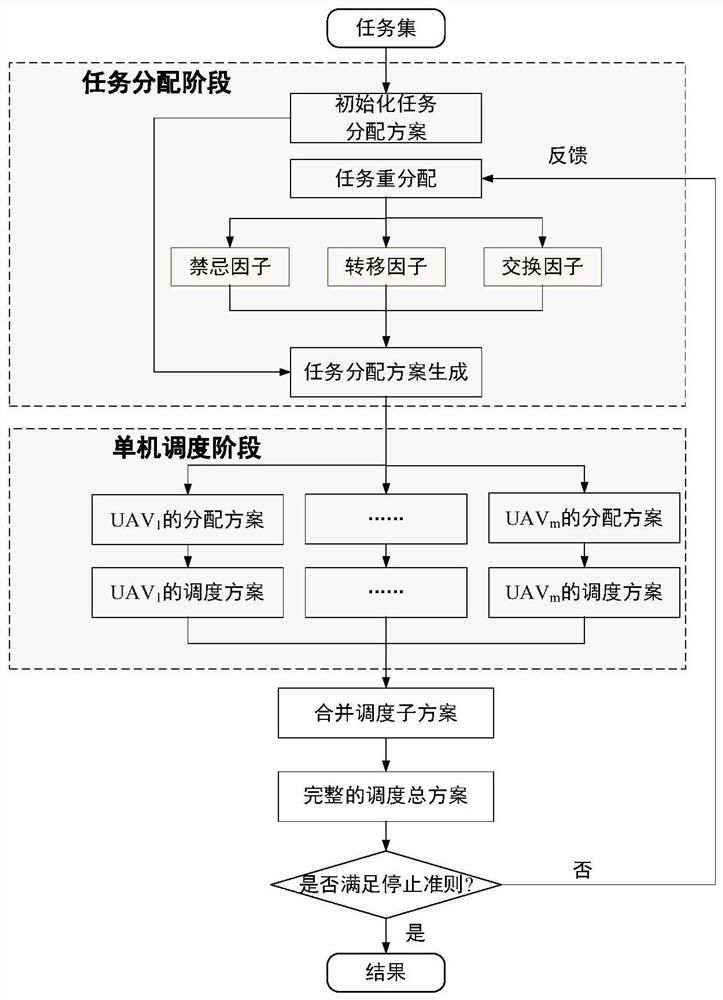
[0076]The state space of multi-UAV cooperative task scheduling increases exponentially with the number of UAVs and tasks, which makes the solution space of this problem face a serious combinatorial explosion problem. However, traditional task scheduling algorithms are difficult to generate high-quality solutions within a reasonable running time. To solve this problem, the present invention proposes a cluster UAV task scheduling framework based on divide and conquer strategy (a multi-UAV task scheduling framework based on divide and conquer, DCF). This framework simplifies complex problems into multiple single-machine scheduling subproblems, and each subproblem will be solved independently. Considering that the decomposition of the problem may affect the global optimality of the final solution result, in the process of solving the multi-UAV cooperative task scheduling problem, the two processes of the decomposition of the complex problem and the solution results of the sub-prob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More