

Ultrasound image-guided operation trajectory planning method for venipuncture robot
A venipuncture and ultrasound image technology, applied in the field of venipuncture robot operation, achieves the effects of noise insensitivity, fast speed and guaranteed safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
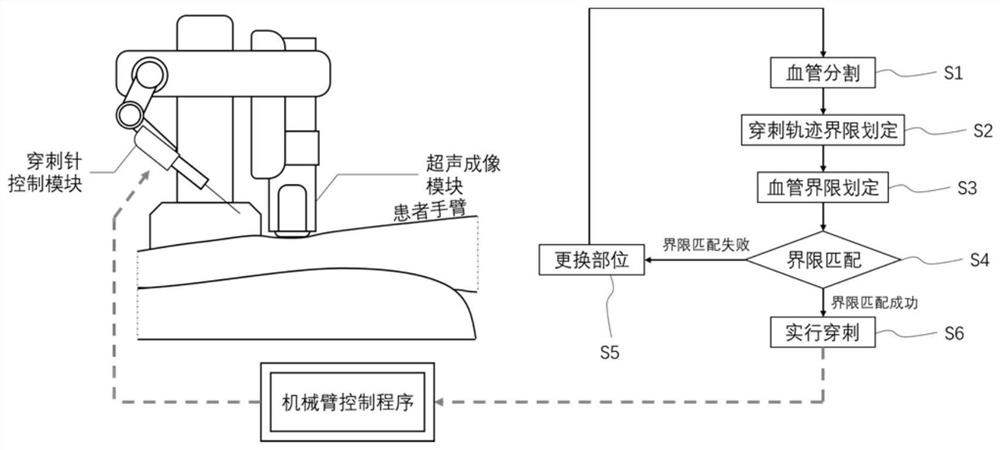
[0046] Such as figure 1 As shown, this embodiment provides a puncture trajectory planning method for a venipuncture robot based on ultrasound image guidance, which is oriented to an automatic venipuncture robot and helps the robot to delineate the puncture trajectory, so that the robotic arm operates the puncture needle according to the predetermined trajectory to realize automatic puncture. The puncture robot controls the puncture piece to puncture blood vessels.
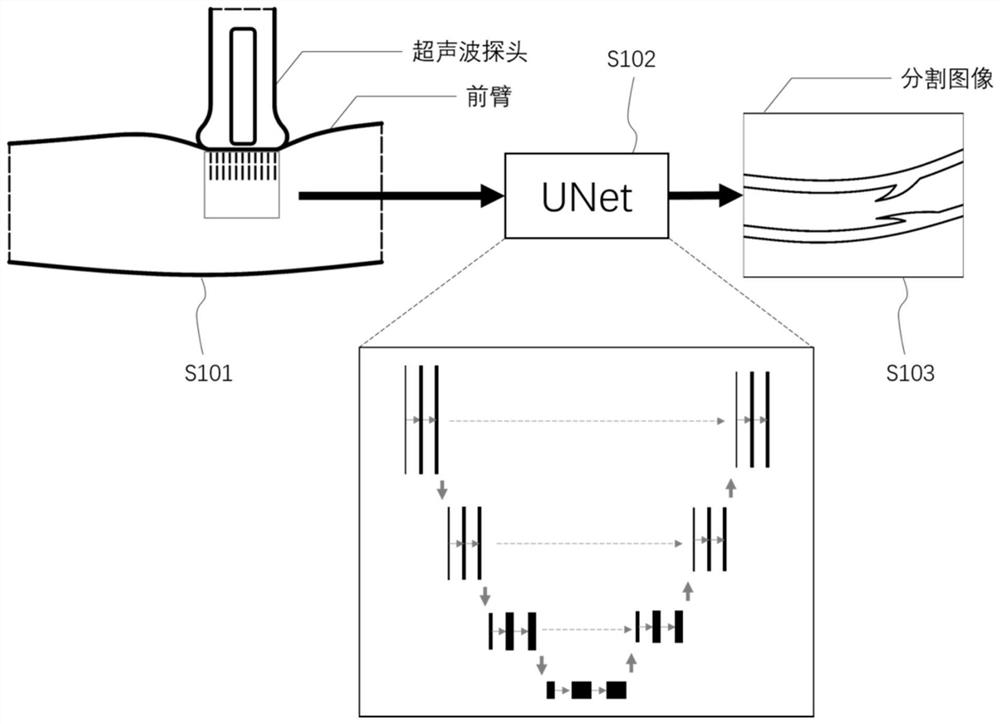
[0047] The method uses the U-Net network framework to segment blood vessels in ultrasound images; then delineates the boundaries of the puncture trajectory and blood vessels according to the segmentation results; then matches the boundaries to judge the feasibility of puncture; Specifically include the following steps:
[0048] Blood vessel segmentation step S1: Acquire a blood vessel ultrasound image of a certain part of the object to be punctured, and obtain a blood vessel segmentation map from the blood vessel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More