

Intelligent feedback puncture needle holder
A puncture needle and intelligent technology, applied in the field of intelligent feedback puncture needle holder, can solve the problems of inability to adjust, difficult to hit the target point, large interaction force between the puncture needle and surrounding tissue, etc., so as to reduce the impact and replace the method handy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with specific examples.
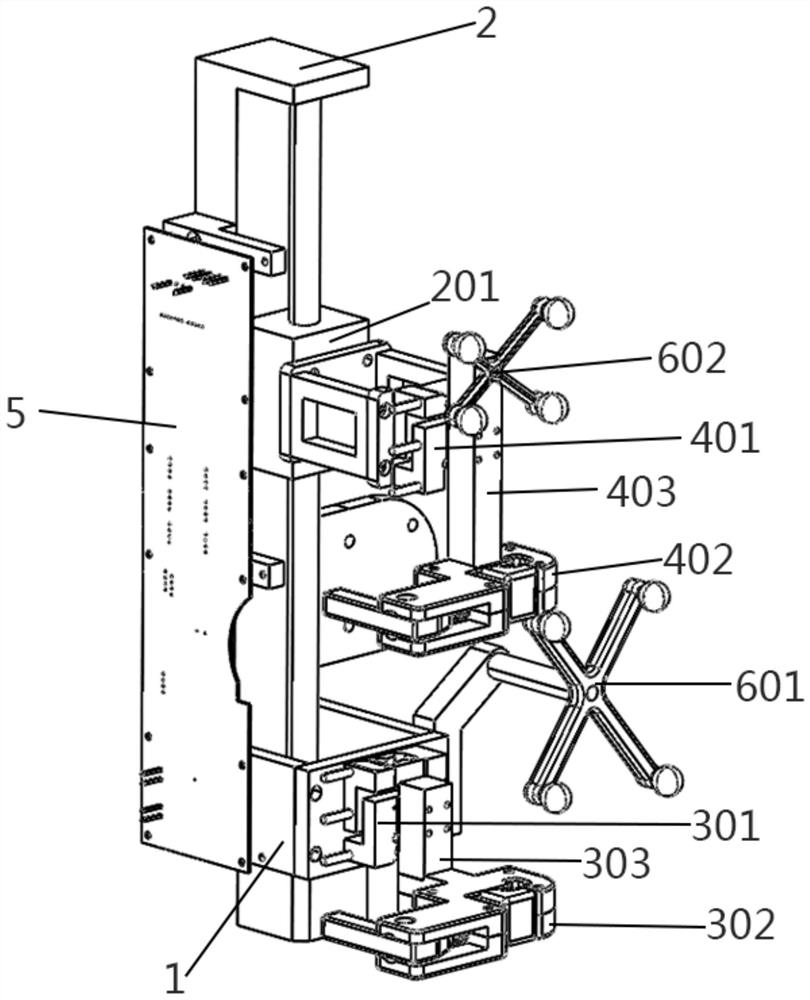
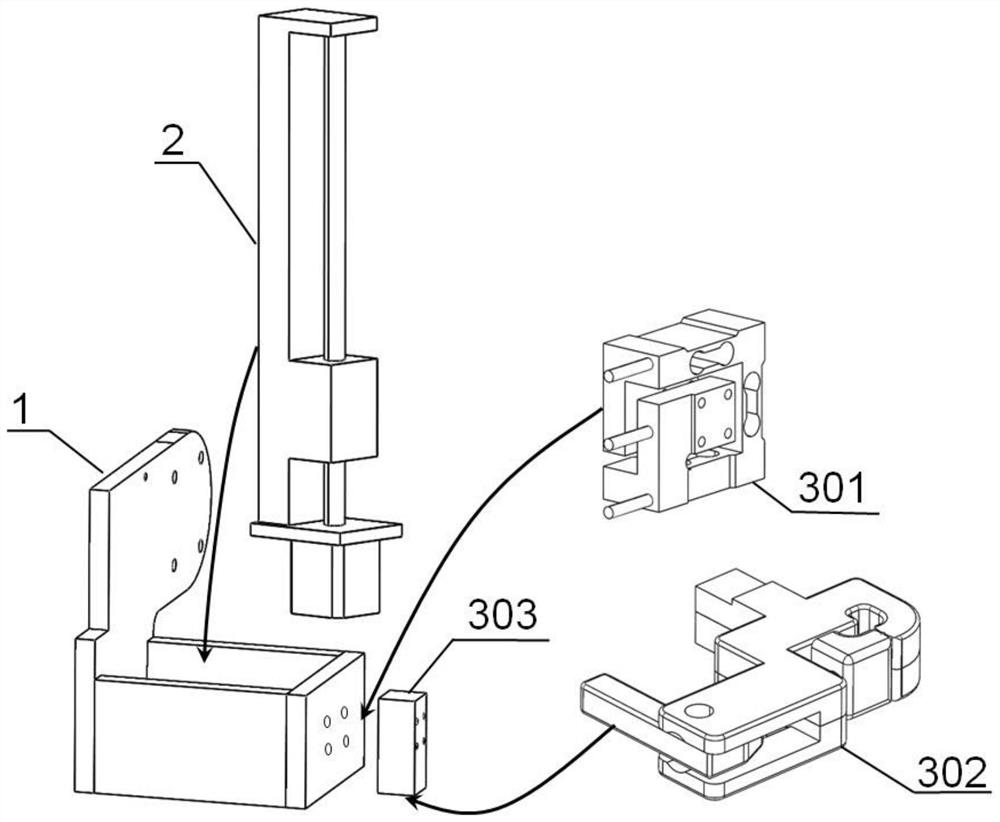
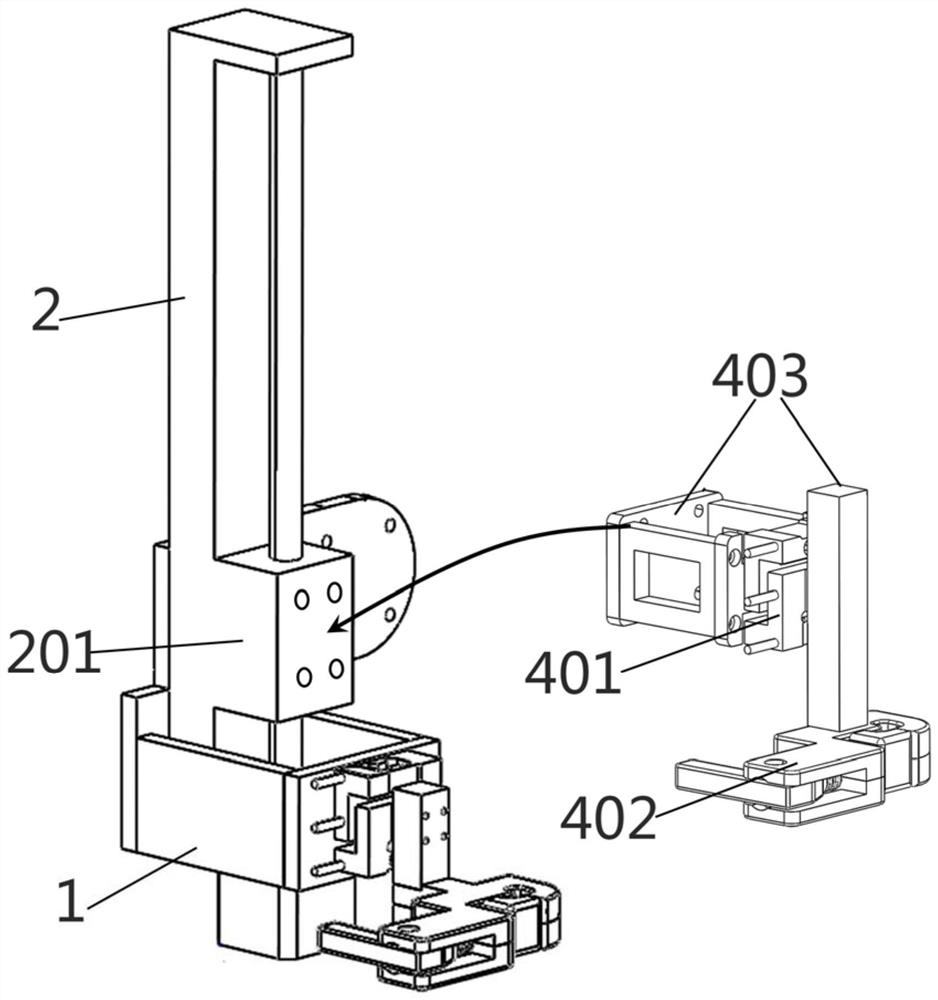
[0020] see Figure 1 to Figure 3 As shown, this embodiment provides an intelligent feedback puncture needle holder, including a mounting frame 1, a linear sliding module 2, a deformation force acquisition device, a puncture force acquisition device, a main control circuit board 5 and an optical positioning device; , the deformation force acquisition device includes a first three-dimensional force sensor 301, a first eccentric pressure handle clamp 302 and a first connecting member 303; the puncture force acquisition device includes a second three-dimensional force sensor 401, a second eccentric pressure handle clamp 402 and the second connecting member 403; the optical positioning device includes a first optical marker frame 601 and a second optical marker frame 602.
[0021] The linear sliding module 2 is vertically installed in the mounting frame 1 by bolts, and the slider ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More