

Screen control system and method based on LeapMotion gesture recognition
A technology of gesture recognition and screen control, applied in character and pattern recognition, input/output process of data processing, input/output of user/computer interaction, etc. problems, to achieve reliable reception and push, high accuracy, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
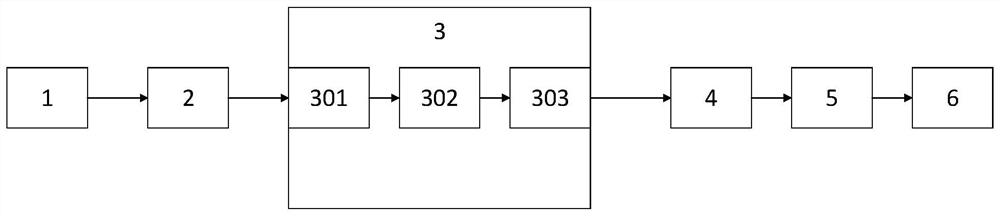
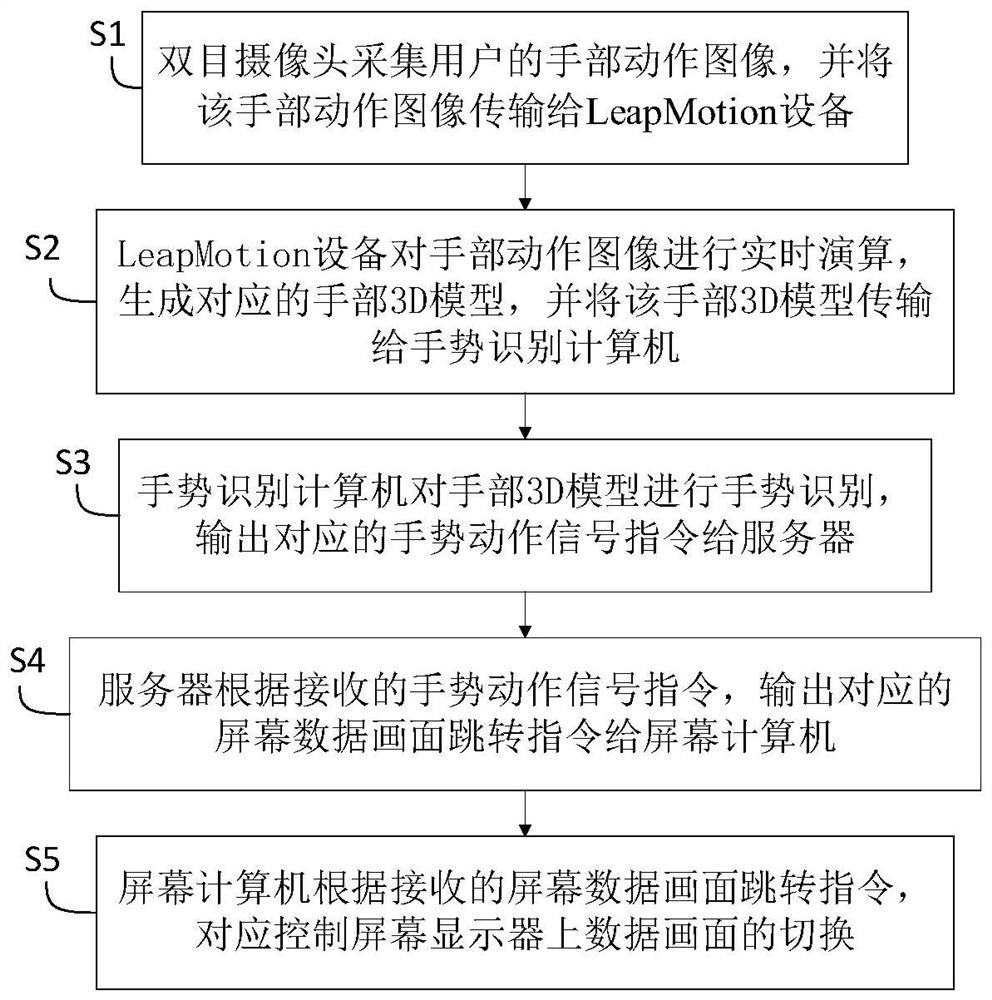
[0041] Such as figure 1 As shown, a screen control system based on LeapMotion gesture recognition includes binocular camera 1, LeapMotion device 2, gesture recognition computer 3 and server 4 connected in sequence, and server 4 is connected to screen display 6 through screen computer 5 machines, wherein, The gesture recognition computer 3 includes a gesture segmentation unit 301, a gesture analysis tracking unit 302 and a gesture recognition unit 303 connected in sequence. In the actual work process, the binocular camera 1 is used to collect the user's hand movement images; The motion image generates a corresponding 3D model; the gesture recognition computer 3 is used for gesture recognition of the 3D model, and outputs gesture action signal instructions; the server 4 outputs corresponding screen data screen jump instructions to the screen computer 5 according to the gesture action signal instructions ; The screen computer 5 controls the switching of the data screen on the scr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More