

Object volume visual measurement method combining target detection and depth calculation
A target detection and depth calculation technology, applied in the field of object volume visual measurement, can solve the problems of algorithm implementation method and AI use, etc., and achieve the effect of reducing susceptibility to environmental noise interference, increasing application scenarios, and reducing data processing capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Attached below Figure 1-3 The present invention is further illustrated with specific examples.
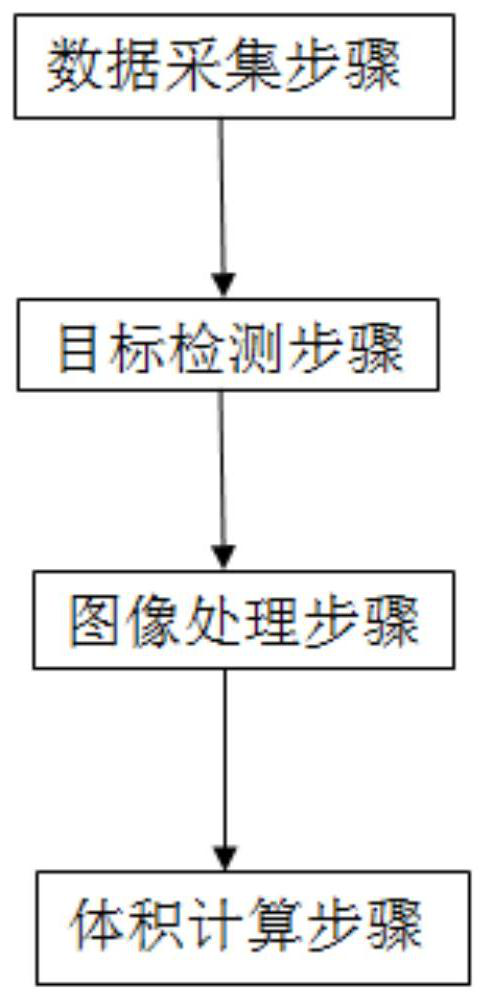
[0020] Such as Figure 1-3 As shown, a visual measurement method of object volume combined with target detection and depth calculation, including:
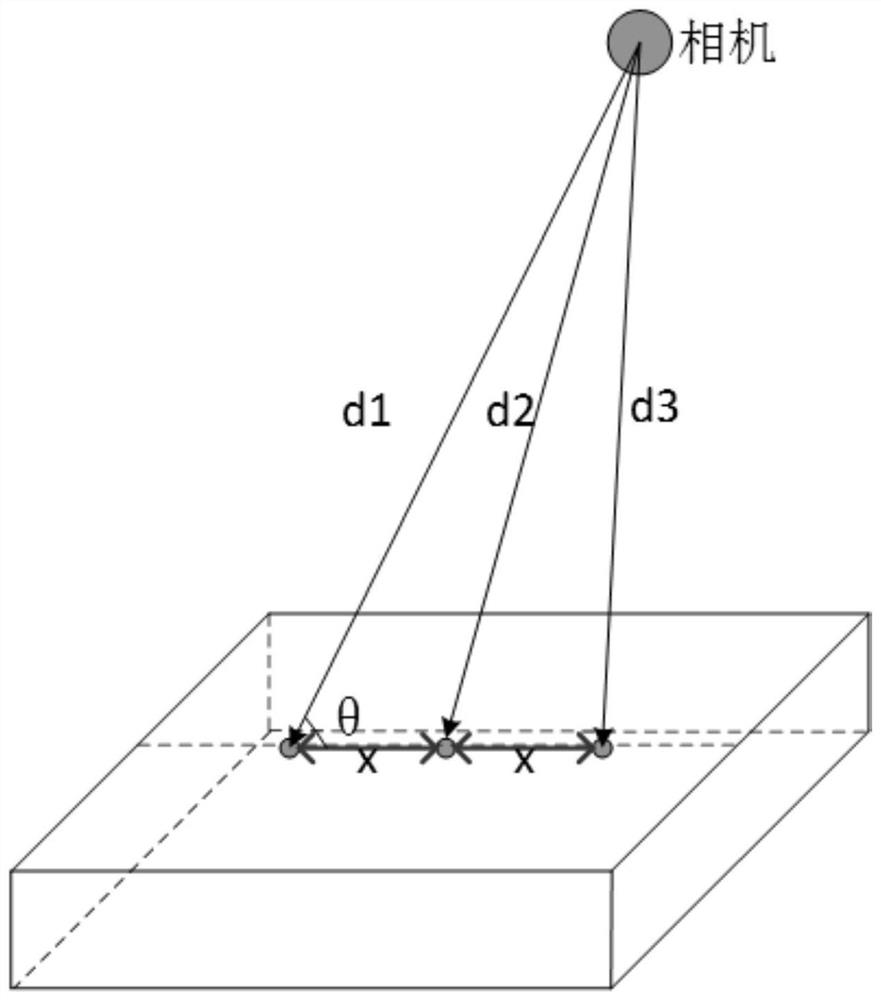
[0021] The data collection step is to take images and collect distance information through a depth camera;
[0022] In the target detection step, the YOLO model is used to train the measured object and realize the detection of the measured object, which not only realizes the preliminary determination of the image pixel area where the object is located, but also avoids the existence of other similarly shaped objects from interfering with the measurement results;
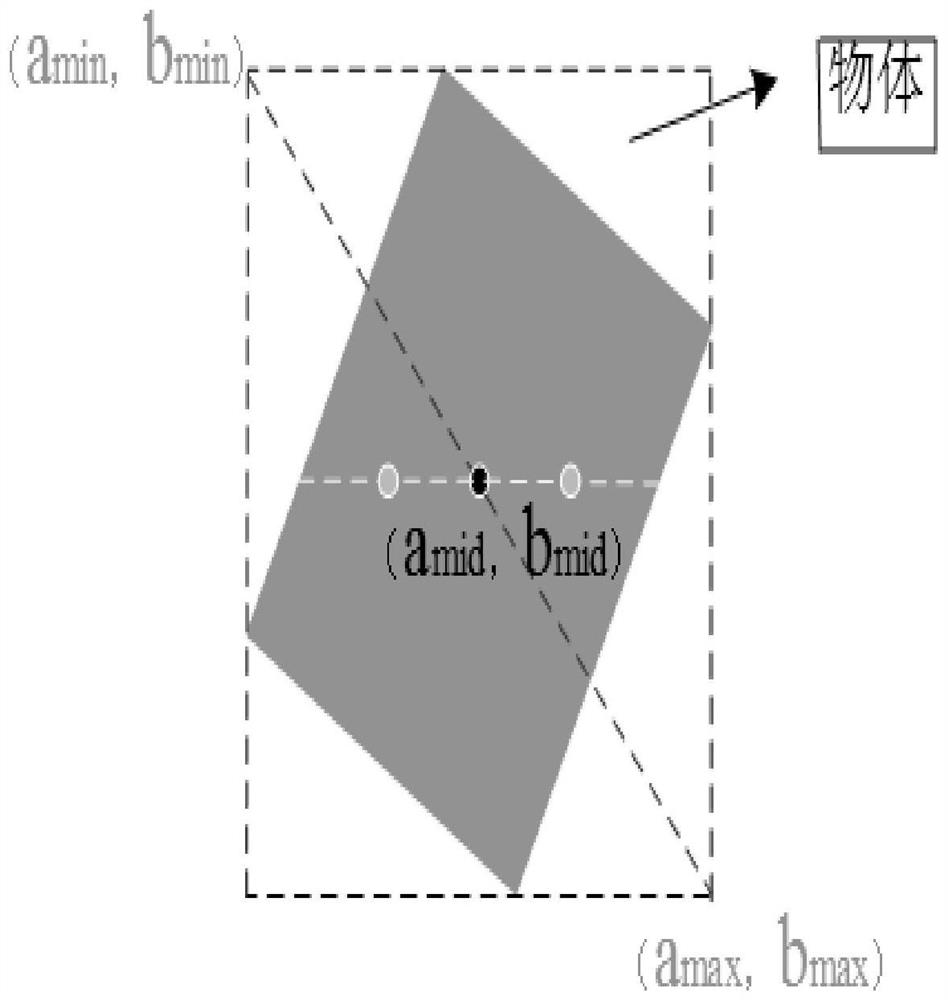
[0023] The image processing step is to process the detected image to obtain pixel coordinate information required for calculation;
[0024] In the volume calculation step, the corresponding depth value is obtained according to the pixel coordinate information obtain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More