Container carrying method based on AGV carrying robots
A technology for handling robots and containers, which is applied in the direction of lifting devices, etc., which can solve the problems of large vehicle design and achieve the effect of large handling capacity, less restrictions, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
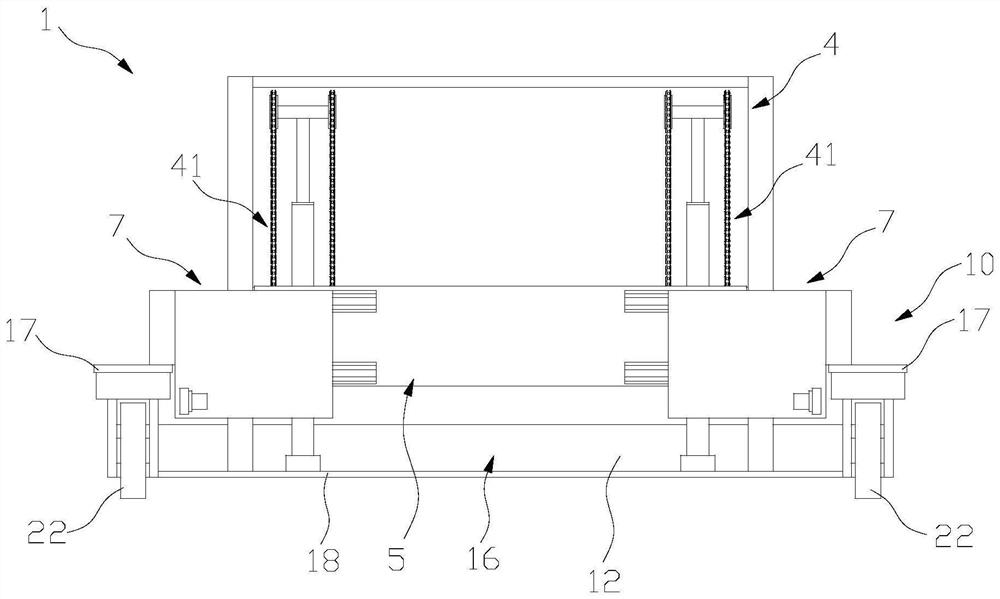
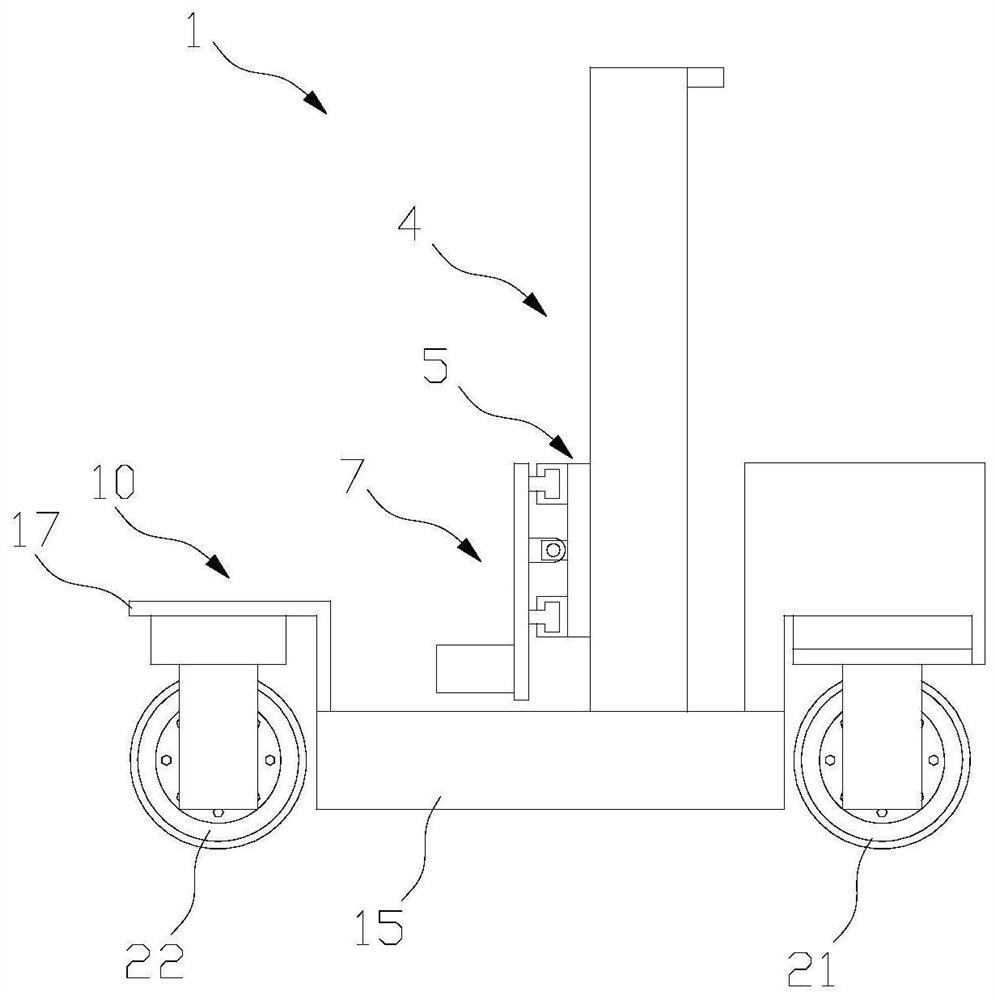
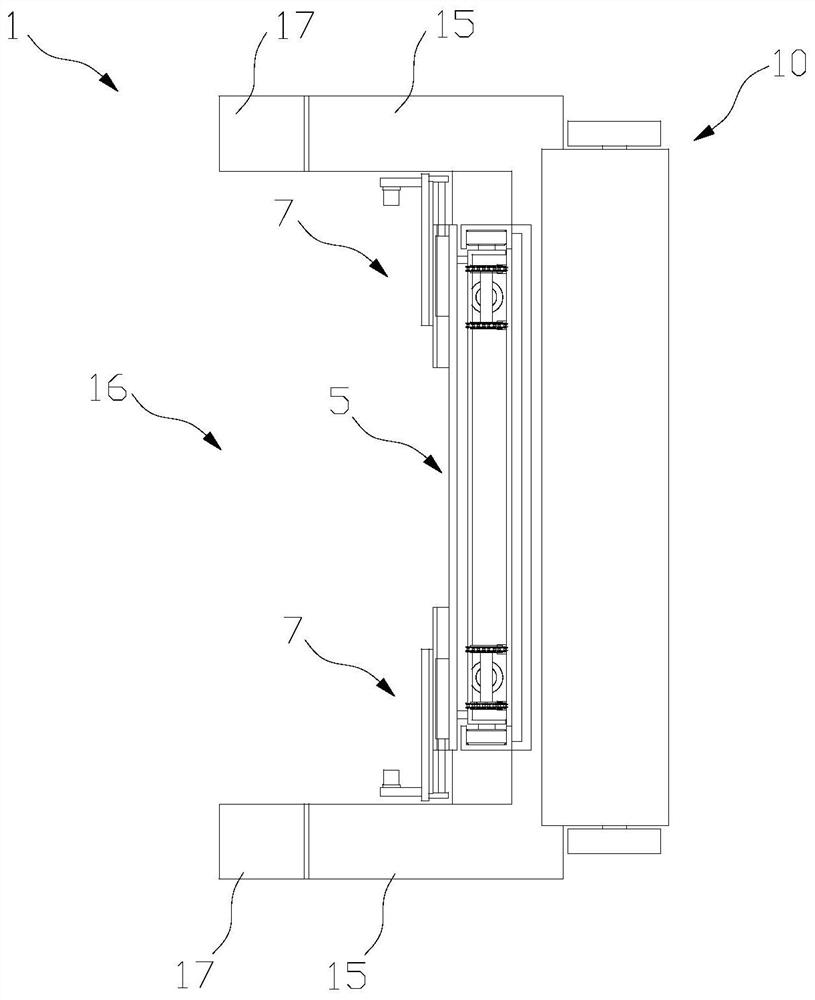
[0049] see Figure 1 to Figure 3 , a handling robot 1 of the present embodiment, comprising a vehicle frame 10, a lifting device 4 and a clamping device, the clamping device is arranged on the vehicle frame 10 through the lifting device 4, and the lifting device 4 For lifting the clamping device, the clamping device includes two clamping arms 7, and the two clamping arms 7 are respectively arranged on both sides of the lifting device 4, and the two clamping arms 7 are used for Clamping both sides of the object to be transported, at least one clamping arm 7 can move horizontally relative to the lifting device 4, so that the distance between the two clamping arms 7 can be adjusted.
[0050] see figure 1 Specifically, the two clamping arms 7 can move horizontally relative to the lifting device 4 .
[0051] see Figure 4 , the frame 10 includes a seat body, and a drive mechanism, a power supply module 3 and a control mechanism (not shown in the figure) arranged on the seat body...
Embodiment 2
[0093] see Figure 11 Another object of the present invention is to provide a handling device using the above-mentioned handling robot 1, which includes a twin robot group, the twin robot group is composed of two robots 1, and the two robots 1 respectively clamp the two ends of the handling object, and simultaneously Lift both ends of the load to carry the load.
[0094] The two robots 1 of the twin robot group will exchange information and communicate through the control mechanism during the cooperative execution of tasks, so that the two robots 1 can move and lift the objects synchronously. This is an application of the prior art and will not be described in detail here. describe.
[0095] Compared with the prior art, a handling device of the present invention includes a twin robot group composed of two smaller and more flexible handling robots. The two handling robots 1 cooperate to respectively clamp the two ends of the handling object, and At the same time, the two ends...
Embodiment 3
[0097] see Figure 12 to Figure 20 Another object of the present invention is to provide a method for carrying the case 9 by the carrying device of the second embodiment, comprising the following steps:
[0098] (a1) The two robots 1 move to the side of the box body 9;
[0099] (a2) Two robots 1 move to the two ends of the box body 9 respectively, and keep a distance from the end of the box body 9;
[0100] (a3) The two robots 1 are respectively close to the two ends of the box body 9, and the clamping device is connected to the connecting portion at the end of the box body 9;
[0101] (a4) After the two robots 1 communicate, the ends of the box body 9 are synchronously lifted by the lifting device;
[0102] (a5) The two robots 1 move the box 9 to a designated position.
[0103] In step (a1), two robots 1 first perform signal matching to form a robot group, and the two robots 1 approach after the two clamping devices are in a relative state, and move to the side of the box ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com