

Tail end position compensation method based on robot joint angle compensation and application of tail end position compensation method
A technology for robot joint and angle compensation, which is applied in the directions of manipulators, program-controlled manipulators, joints, etc., and can solve problems such as the inability to obtain the expected compensation effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
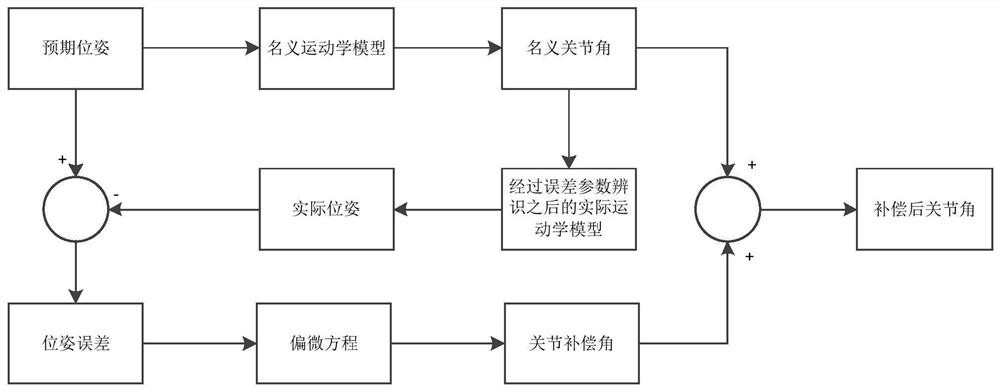
[0080] Such as figure 1 As shown, this embodiment provides a method for end position compensation based on robot joint angle compensation, including the following steps:
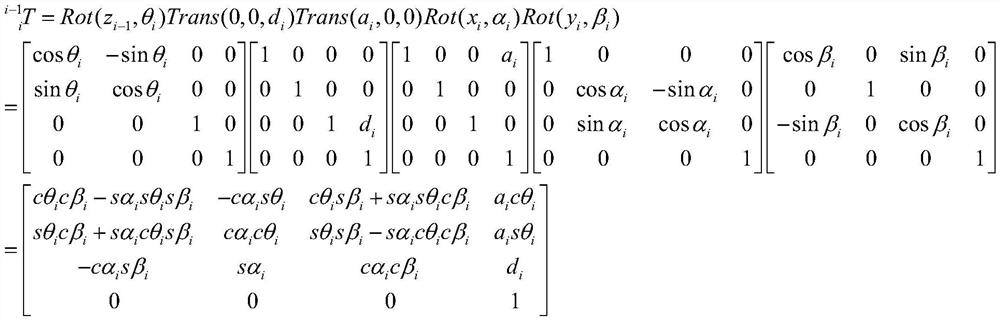
[0081] First, establish the MD-H kinematics model of the six-degree-of-freedom robot. The establishment of the coordinate system is the selection of the direction of the coordinate axis and the origin. The method for establishing the reference coordinate system of the joint axis in the D-H model is as follows:
[0082] (1) Establishment of z-axis direction
[0083] The coordinate system established at joint i is named coordinate system i-1. If joint i is a rotation axis joint, the z-axis direction is consistent with the axis of the joint rotation axis; if joint i is a moving joint, set its moving direction as the z-axis axis direction;
[0084] (2) Establishment of the origin of the coordinate system and the direction of the x-axis
[0085] There may be three geometric relationships between the axes of tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More