

Robot trajectory planning method and system
A trajectory planning and robotics technology, applied in control/regulation systems, instruments, navigation, etc., can solve the problem of high computational cost, and achieve the effect of reducing the number and computational burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
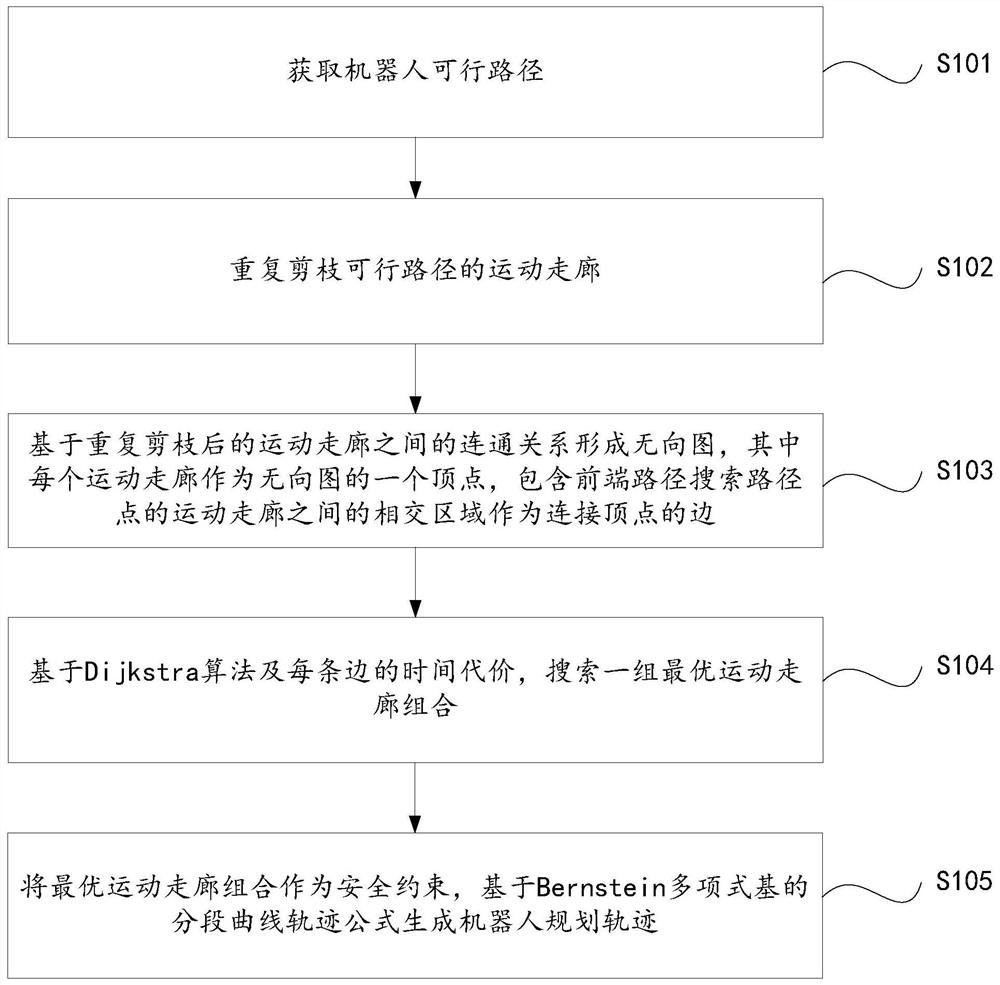
[0044] refer to figure 1 , a robot trajectory planning method of the present embodiment, which includes:
[0045] Step S101: Obtain the feasible path of the robot.
[0046] In a specific implementation, a feasible path can be obtained through the Hybrid A* algorithm.
[0047] It should be noted here that other existing algorithms can also be used to obtain feasible paths, which will not be repeated here.
[0048] In the following, the Hybrid A* algorithm obtains a feasible path as an illustration.
[0049] Step S102: Repeatedly pruning motion corridors of feasible paths.
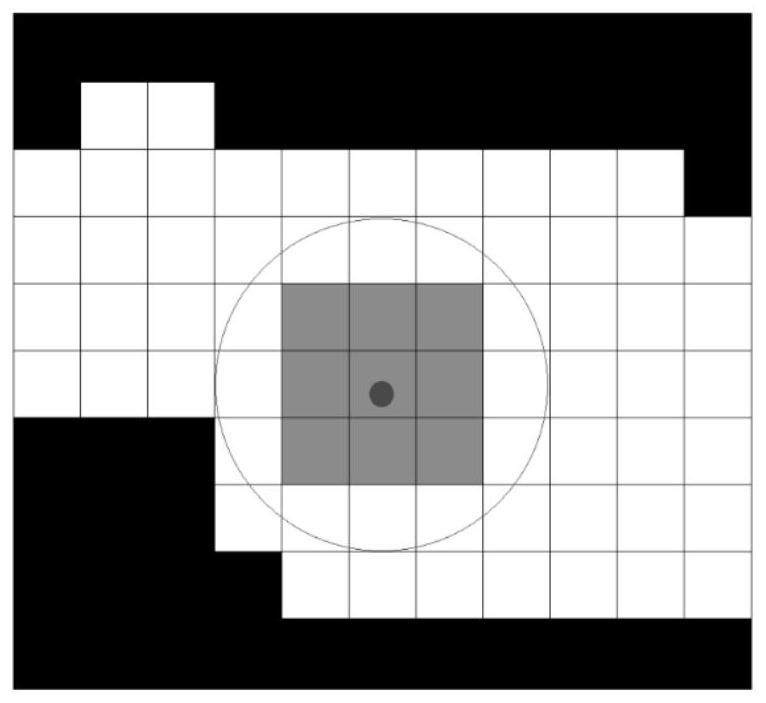
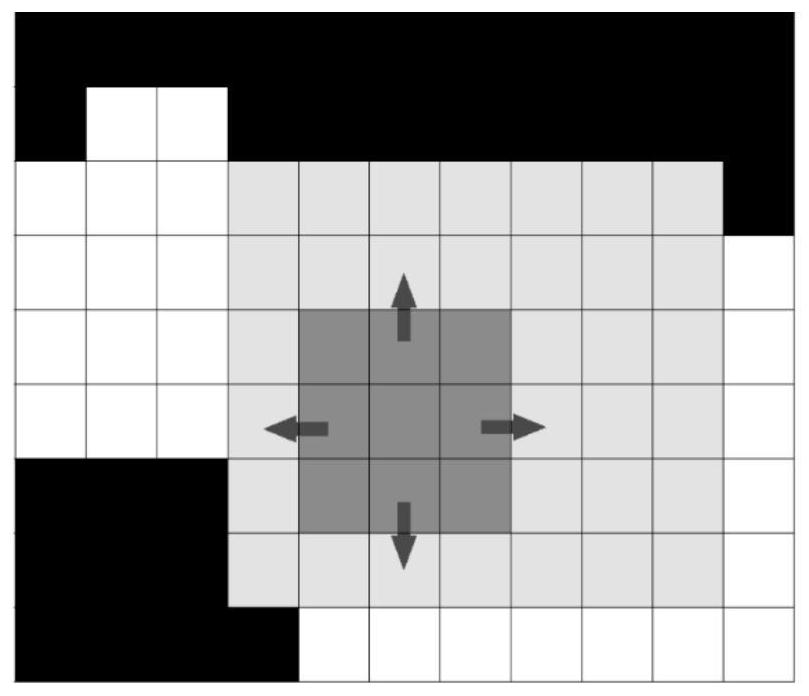
[0050] In order to make use of as much free space as possible for each movement corridor, it is necessary to perform two steps of initial expansion and axial expansion. The initial expansion is to expand the initial free space of the nodes in the path that need to generate motion corridors. Since each node in the path has been stored in the path array by the Hybrid A* algorithm during the front-end sear...
Embodiment 2
[0112] The present embodiment provides a robot trajectory planning system, which includes:
[0113] A feasible path obtaining module, which is used to obtain the feasible path of the robot;
[0114] a repetitive pruning module for repetitive pruning of motion corridors of feasible paths;
[0115] An undirected graph forming module, which is used to form an undirected graph based on the connection relationship between the motion corridors after repeated pruning, wherein each motion corridor is used as a vertex of the undirected graph, and contains one of the motion corridors of the front-end path search path point. The intersecting area between serves as the edge connecting the vertices;
[0116] An optimal motion corridor search module, which is used to search for a group of optimal motion corridor combinations based on the Dijkstra algorithm and the time cost of each edge;
[0117] The planning trajectory generation module is used to use the optimal motion corridor combinat...
Embodiment 3
[0120] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the steps in the robot trajectory planning method described in the first embodiment above are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More