

High-temperature flexible manipulator
A manipulator and flexible technology, applied in the field of high-temperature flexible manipulators, can solve the problems of single heat dissipation and cooling measures of fingers, speed up heat dissipation of fingers, increase heat dissipation, etc., and achieve the effect of delaying the temperature rise of fingers, prolonging the life of fingers, and prolonging the service life of fingers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013]The present invention will be further described below in conjunction with the drawings, but the present invention is not limited to the scope of the described embodiments.
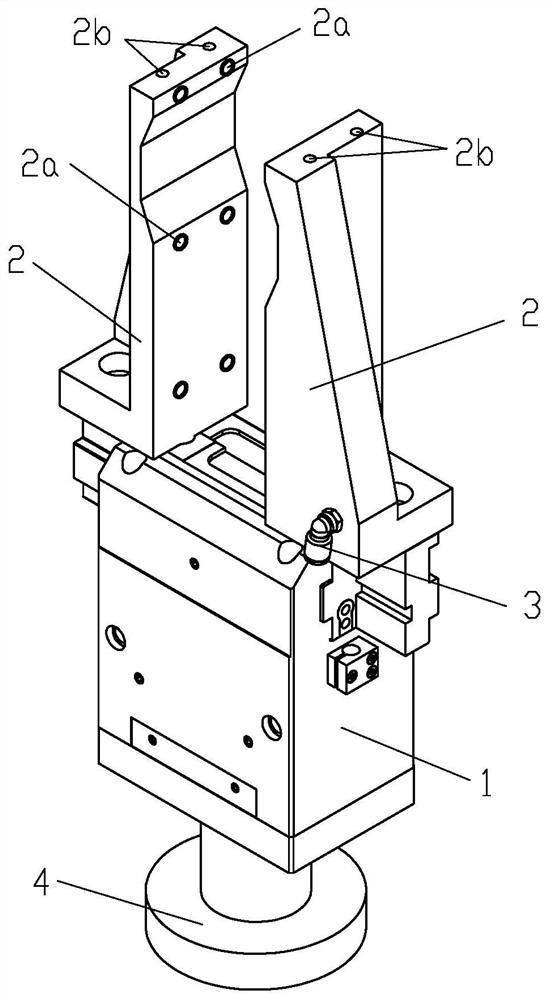
[0014]Seefigure 1, A high-temperature flexible manipulator, including a connecting flange 4 for connecting with the robot, two oppositely arranged fingers 2 driven by a heavy-duty finger gripping cylinder 1, the fingers 2 are provided with multiple blowing holes 2a, and The two blowing holes 2a are connected with the metal gas pipe joint 3 through the internal air passage, and the metal gas pipe joint 3 is connected with the external compressed gas source through the pipeline.
[0015]Among them, the multiple blowing holes 2a are distributed in at least two rows along the width direction of the finger, and each row is provided with at least two; the internal airway is formed by drilling a slender drill bit, and is blocked by a plug 2b at the end of the drilled finger In this embodiment, the finger tip is drilled...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More