

Bridge crane positioning and swing eliminating method based on fuzzy sliding mode control
A technology of fuzzy sliding mode control and bridge cranes, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to cope with harsh environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] Specific examples are given below to further describe the technical solution of the present invention in a clear, complete and detailed manner. This embodiment is the best embodiment on the premise of the technical solution of the present invention, but the protection scope of the present invention is not limited to the following embodiments.
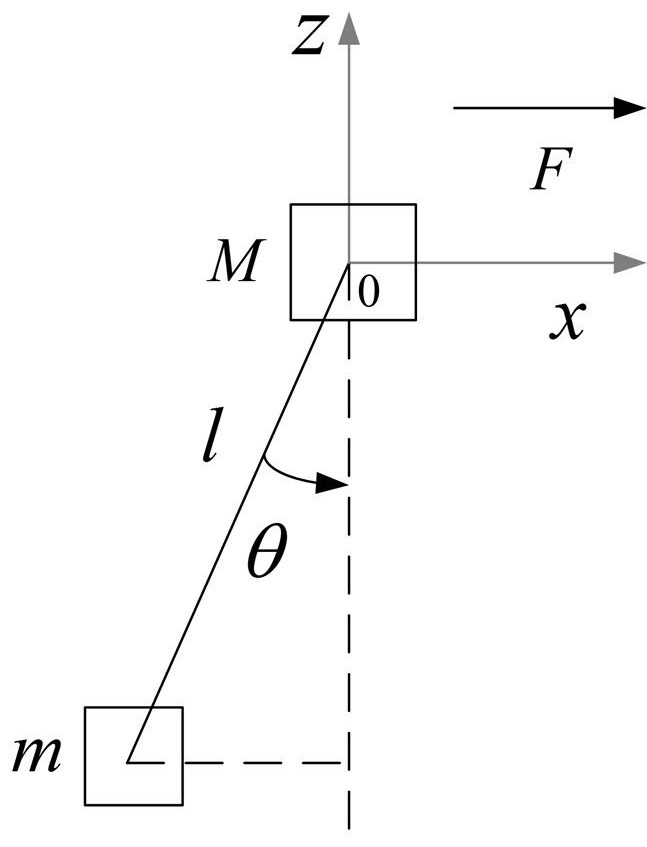
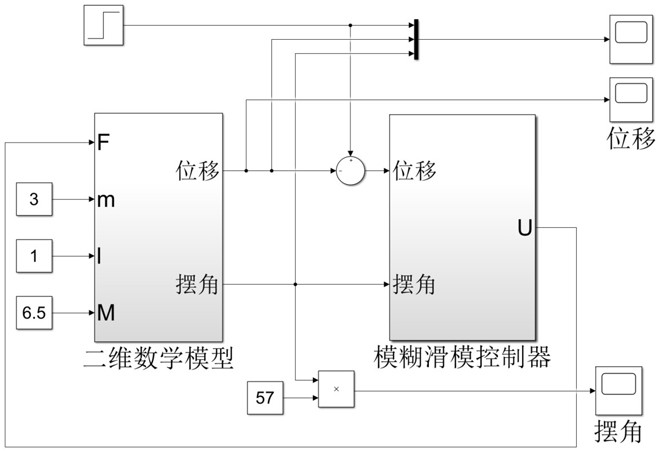
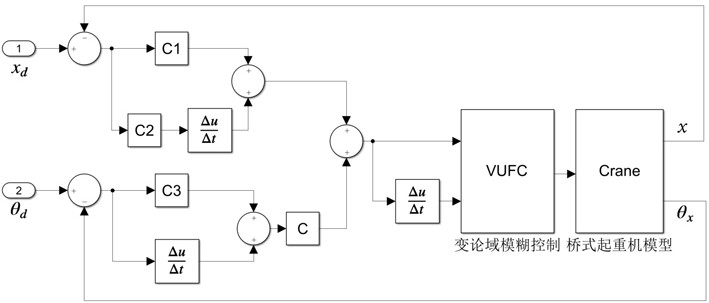
[0053] A fuzzy sliding mode control based positioning and swing elimination method for bridge cranes is based on sliding mode variable structure control, combining fuzzy control with sliding mode variable structure control to construct a new synthetic sliding mode surface, and designing a suitable fuzzy The rules ensure that the state of the system is always on the sliding surface, and the fuzzy control rules are used to adjust the size of the control variable u, so as to realize the efficient positioning and anti-swing control of the bridge crane, weaken the chattering phenomenon, and improve the response speed.
[0054] The tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More