

Intelligent path planning method for fire-fighting robot
A fire-fighting robot and path planning technology, applied in the fields of instruments, artificial life, image data processing, etc., can solve the problems of inability to guarantee the shortest path planning, poor self-adjustment ability, and high consumption of computing resources, etc., to reduce pheromone The effect of volatilizing parameter values, improving accuracy, and accelerating convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
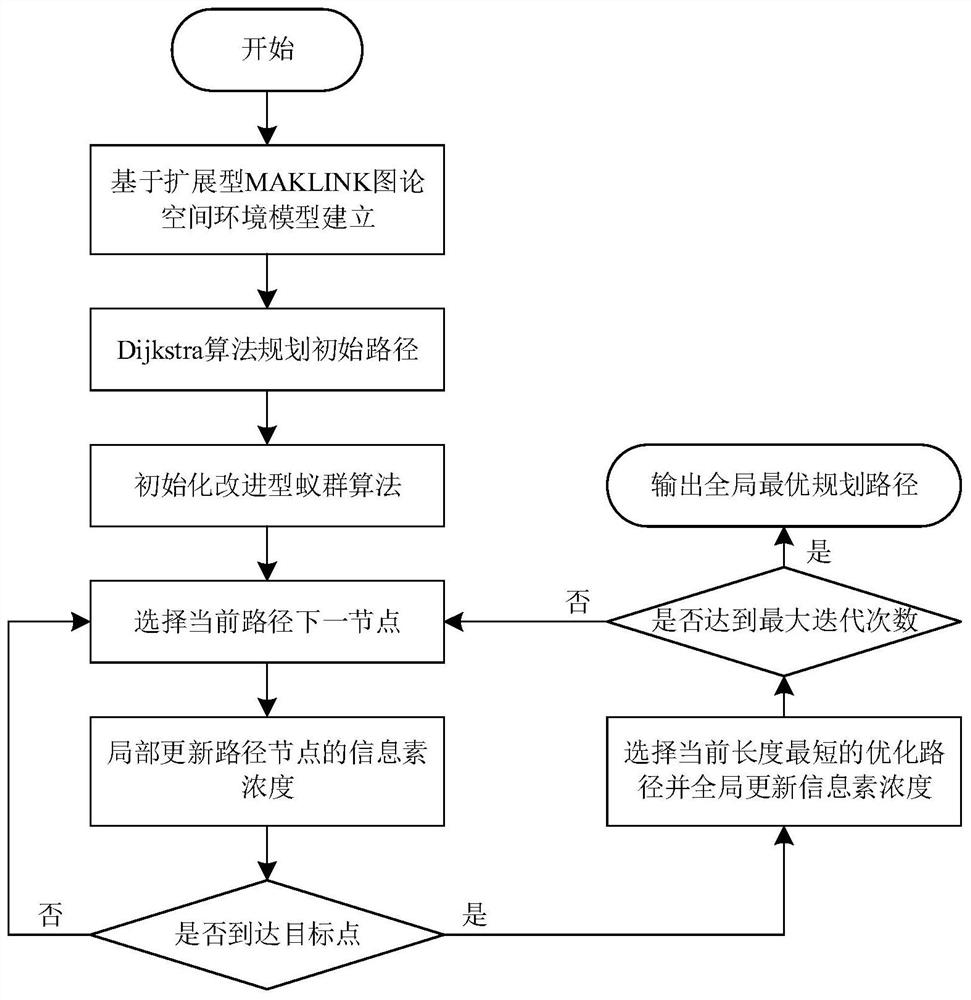
[0041]This embodiment provides an intelligent path planning method for a fire fighting robot, which includes the following steps:
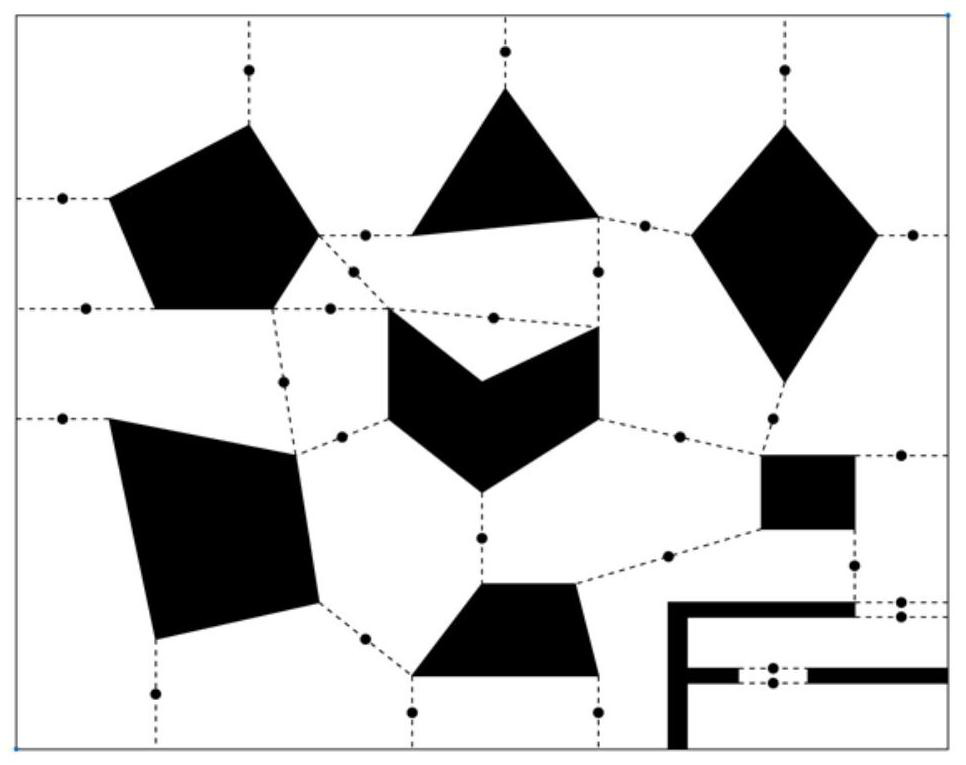
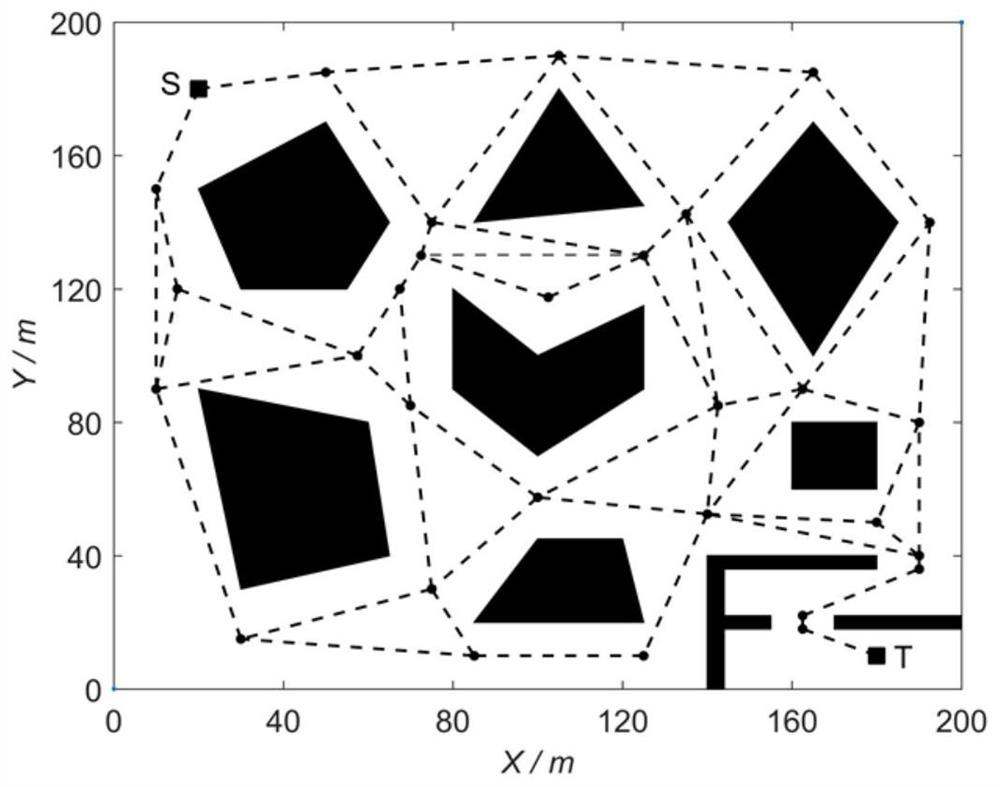
[0042]Environmental information preprocessing steps: establish a world coordinate system based on the fire space environment information where the fire robot is located, use polygons to describe the edge of the obstacle, obtain the vertex coordinates of the obstacle in the fire space environment, and determine the fire robot’s position in the world coordinate system Garrison points and fire fighting points;
[0043]Modeling steps of the fire site space environment: According to the fire site space environment information, use the extended MAKLINK graph theory to construct the fire site space environment model. The fire site space environment model includes the movable path of the fire fighting robot;
[0044]Initial path planning steps: based on the fire site space environment model, according to the determined garrison point and fire suppression point, with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More