

Control method and device for self-moving robot and self-moving robot
A control method and self-moving technology, which is applied in the field of robotics and can solve the problem of insufficient intelligence of self-moving robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
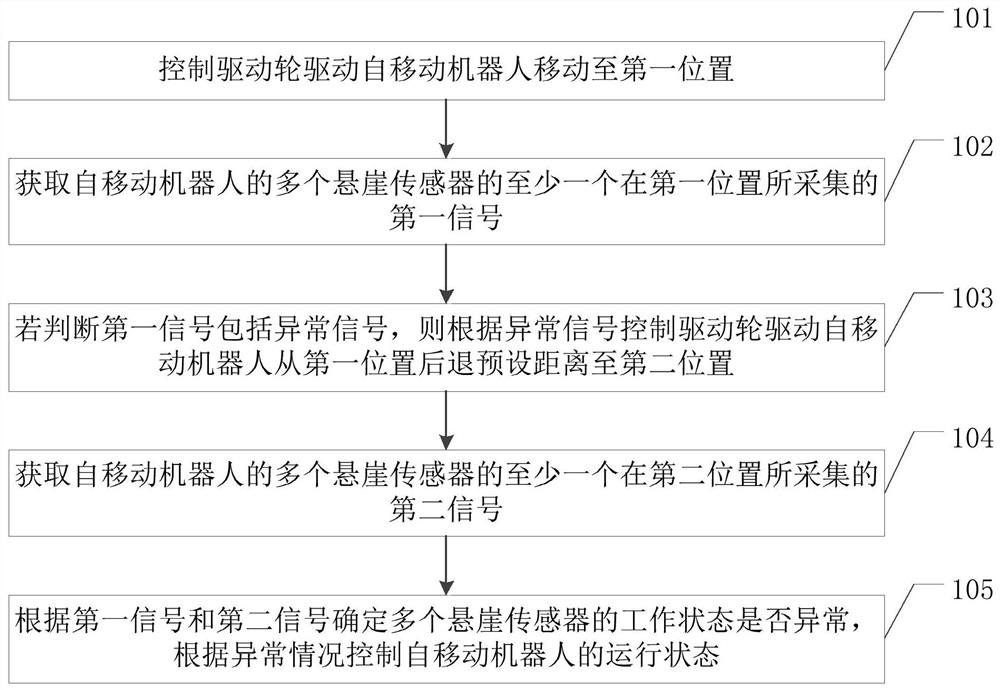
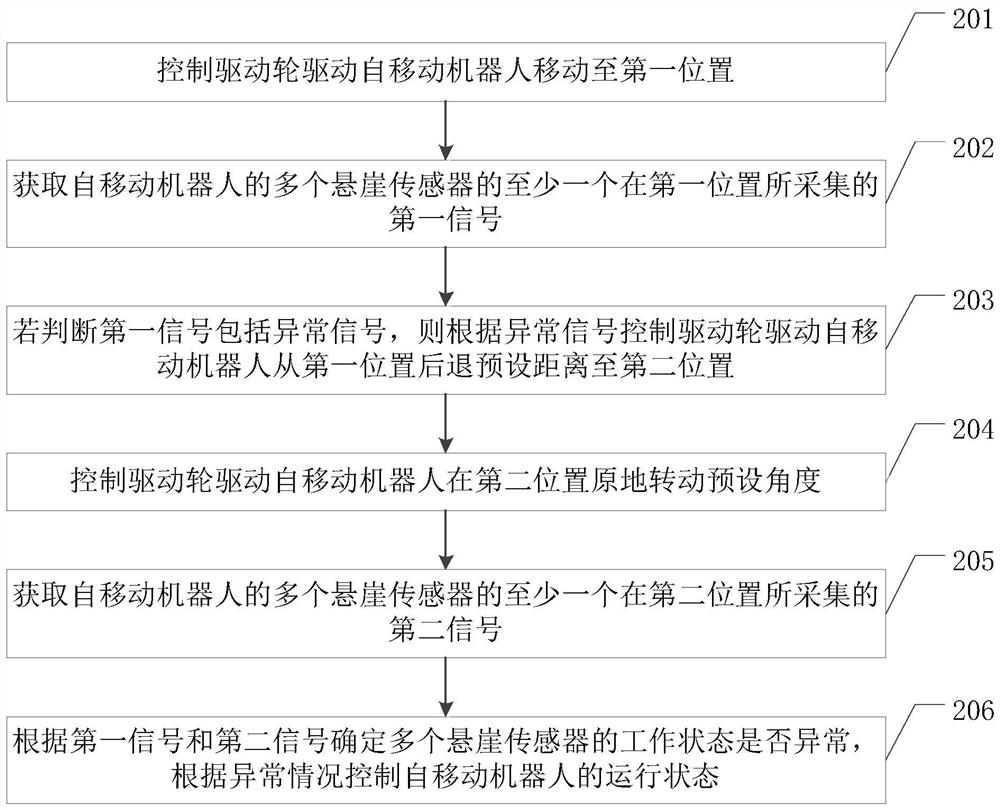
[0031] The invention provides a control method and device of a self-moving robot, and the self-moving robot is used for intelligently identifying whether the working state of the cliff sensor itself is abnormal, so as to control the running state of the self-moving robot according to the abnormal situation. .
[0032] In order to enable those skilled in the art to better understand the solutions of the present invention, the embodiments of the present invention will be described below with reference to the drawings in the embodiments of the present invention.
[0033] The terms "first", "second", "third", "fourth", etc. (if any) in the description and claims of the present invention and the above drawings are used to distinguish similar objects, and not necessarily Used to describe a specific sequence or sequence. It is to be understood that the terms so used are interchangeable under appropriate circumstances such that the embodiments described herein can be practiced in seq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More