

Surgical navigation and mechanical arm device for craniocerebral puncture and positioning method
A surgical navigation and robotic arm technology, which is applied to the surgical navigation and robotic arm device for craniocerebral puncture, the navigation and positioning robotic arm device, the surgical navigation and the positioning field of the robotic arm device, and can solve the problem that the position of the insertion tip cannot be displayed and moved in real time. The problems of low insertion efficiency and inability to observe in real time can improve the precision and accuracy of surgery, facilitate surgery, and reduce secondary injuries.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, and the present invention will be further explained below in conjunction with the accompanying drawings and specific implementation methods.
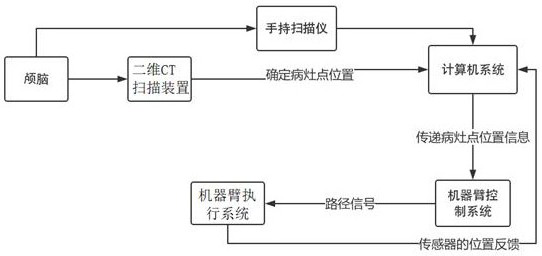
[0040] Such as figure 1 As shown, the present invention is a surgical navigation and robotic arm device for craniocerebral puncture, including: a three-dimensional CT scanning device, a handheld scanner, a computer system, a robotic arm control system, and a robotic arm execution system; a three-dimensional CT scanning device, a handheld The scanner, the robot arm control system and the robot arm execution system are respectively connected with the computer system; the robot arm control system is connected with the robot arm execution system. The three-dimensional CT scanning device is used for three-dimensional CT scanning of the brain, and the doctor determines the lesion in the patient's brain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More