

Space-time synchronization system and device for laser radar and camera data and readable medium
A laser radar and synchronization system technology, applied to the time synchronization and space alignment of the two sensors of the camera, in the field of vehicle laser radar, can solve the problem of low precision, unsatisfactory automatic driving, time synchronization accuracy and system reliability. Automated driving needs and other issues to achieve the effect of improving consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0053] In order to solve the technical problems in the aforementioned background technology, the method for controlling the virtual reality object will be introduced in detail below.
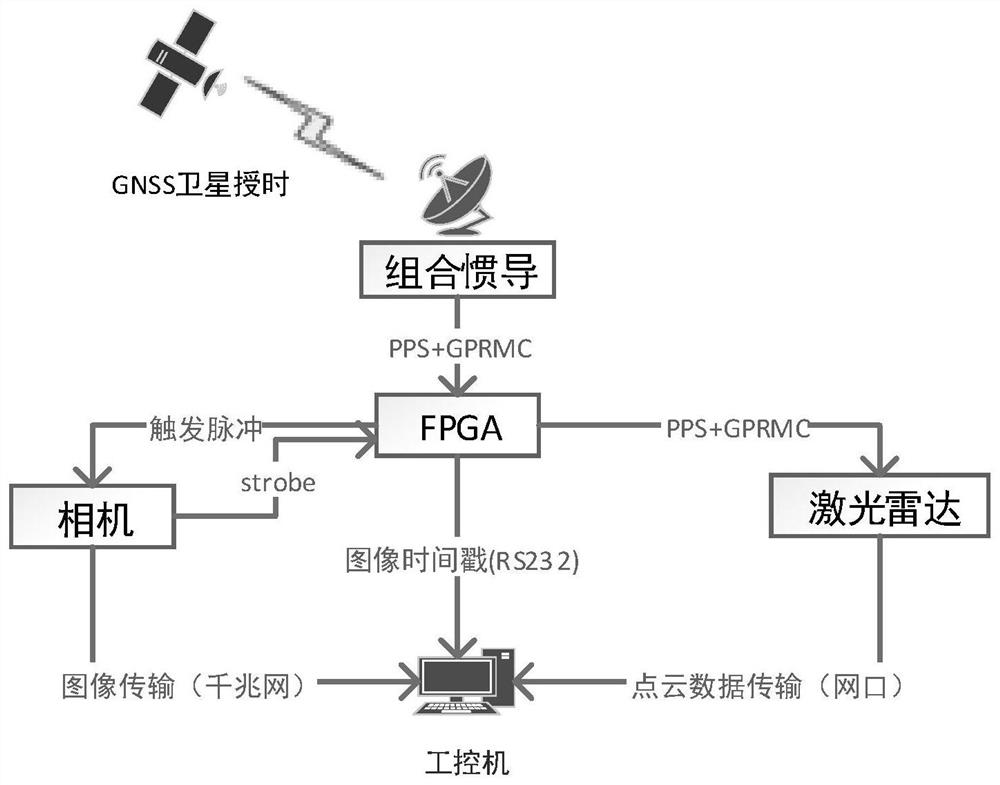
[0054] The time and space synchronization scheme of FPGA-based self-driving lidar and camera according to the present invention, its hardware core is as follows: figure 1 As shown, it includes: FPGA module, industrial computer, sensor module includes: combined inertial navigation module, laser radar, camera, etc. Such as Figure 4 It is a flowchart of the present invention.
[0055] S100, FPGA receives external timing, combines the PPS second pulse + GPRMC message generated by the inertial navigation module, and corrects the local clock; even when the GNSS signal is blocked, the FPGA can still maintain the clock accuracy for a certain period of time by its own crystal oscillator;
[0056] S200. The FPGA sends a PPS second pulse + GPRMC message to the laser radar, so that the internal clock sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More