

A Variable Stiffness Multi-directional Grasping Robot Based on Folding Plate Mechanism
A variable stiffness and robot technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems such as self-adaptive capacity limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with embodiment the present invention is described in further detail:
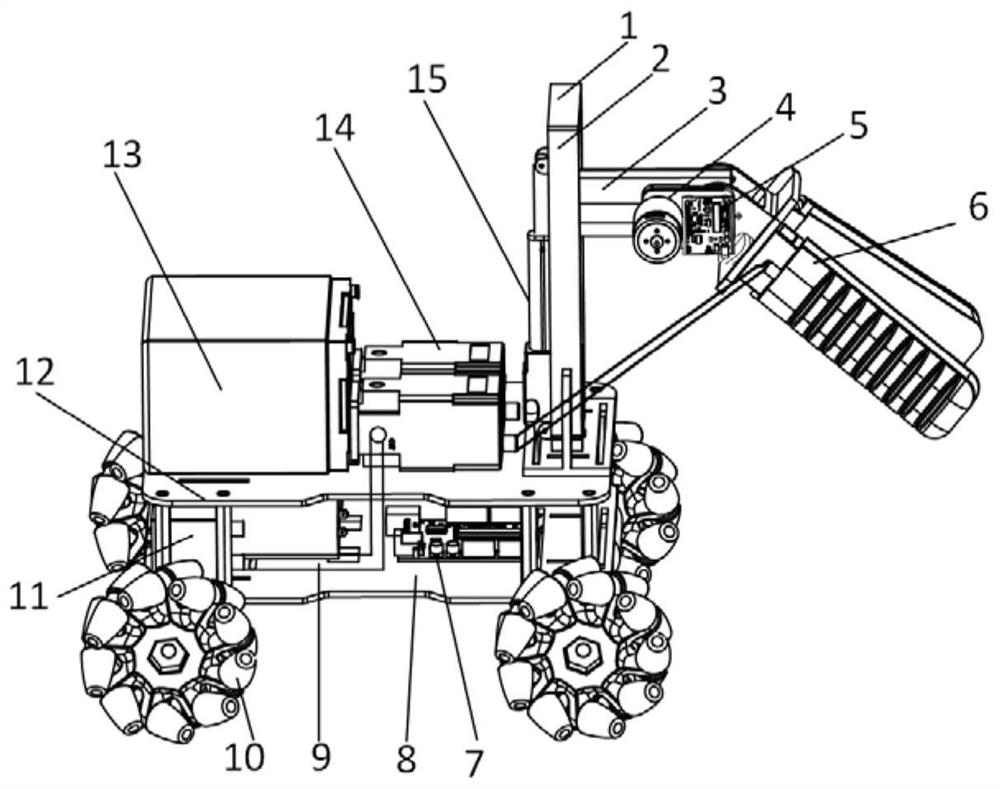
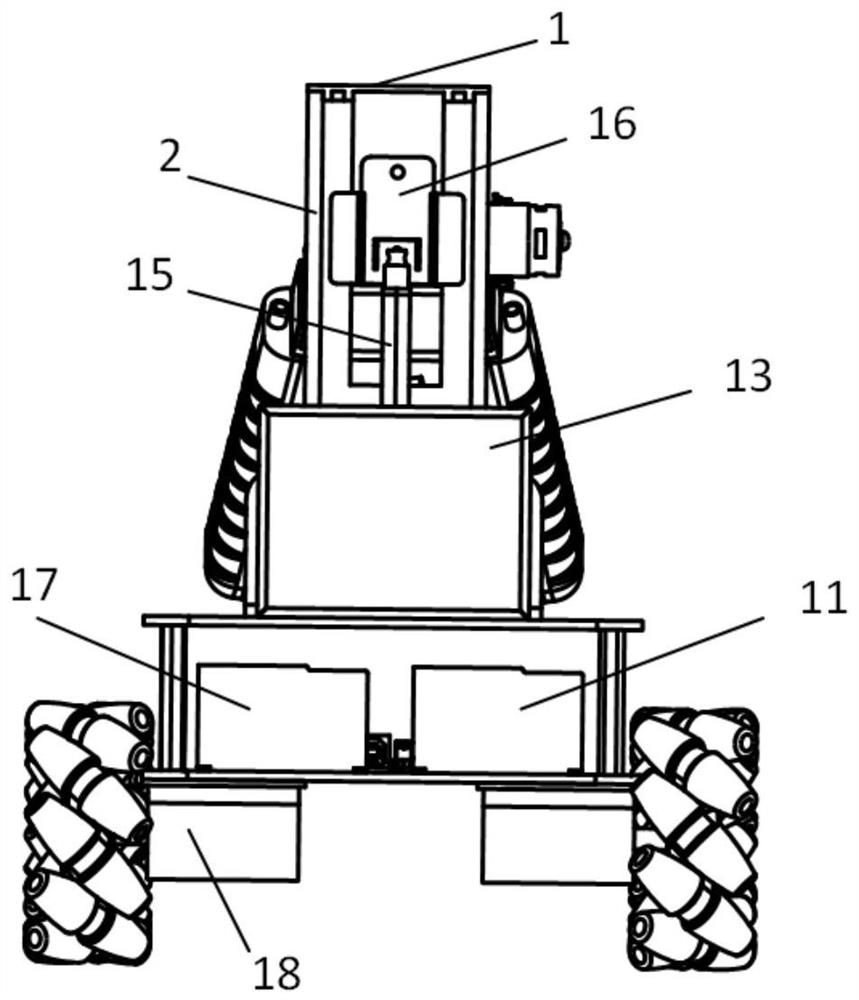
[0026] Such as Figure 1 to Figure 5 As shown, a variable-stiffness multi-directional grasping robot based on a folding plate mechanism includes a planar moving mechanism, a pneumatic control mechanism fixed on the planar moving mechanism, a lifting and rotating actuator, and a moving mechanism connected to the lifting and rotating actuator. Variable stiffness flexible gripper 6;
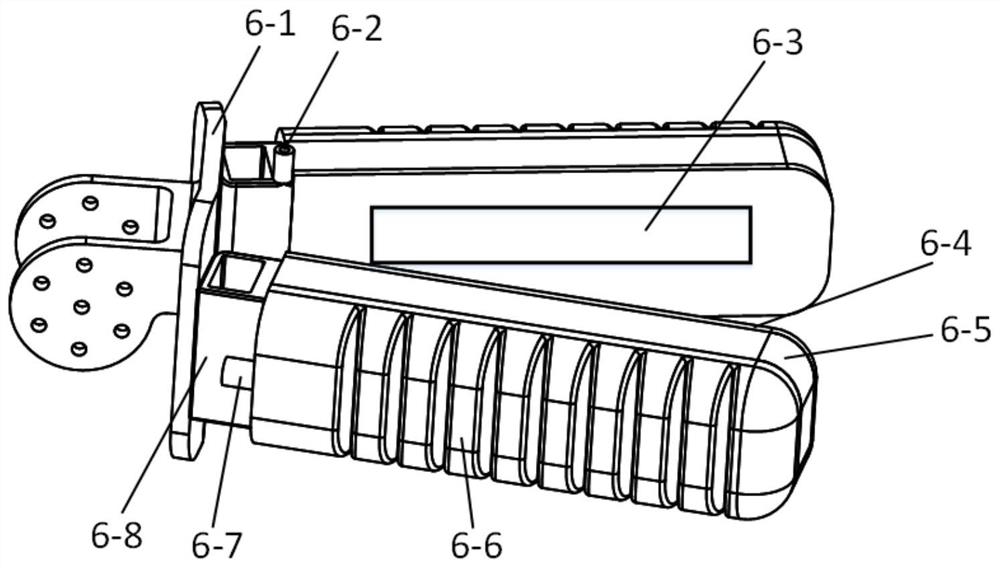
[0027] The variable stiffness flexible gripper 6 includes two variable stiffness grasping units with the same structure and arranged symmetrically, the variable stiffness grasping unit includes a contact layer 6-4, a variable stiffness layer 6-5 and a The flexible driving layer 6-6 on the outer side of 6-5, the interior of the variable stiffness layer 6-5 is divided into multiple independent compartments by the folding plate mechanism 6-10, and variable stiffness modules are arranged in each of the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More