

Four-engine double-rotary-arm vertical take-off and landing unmanned aerial vehicle and flight control method thereof
A vertical take-off and landing, unmanned aerial vehicle technology, applied in vertical take-off and landing aircraft, unmanned aerial vehicles, aircraft control and other directions, can solve the problem of insufficient rotor control margin, reduced cruise speed and endurance, and increased overall aircraft resistance, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In the following description, specific details such as specific system structures and technologies are presented for the purpose of illustration rather than limitation, so as to thoroughly understand the embodiments of the present invention. It will be apparent, however, to one skilled in the art that the invention may be practiced in other embodiments without these specific details. In other instances, detailed descriptions of well-known systems, devices, circuits, and methods are omitted so as not to obscure the description of the present invention with unnecessary detail.
[0049] In order to illustrate the technical solutions of the present invention, specific examples are used below to illustrate.
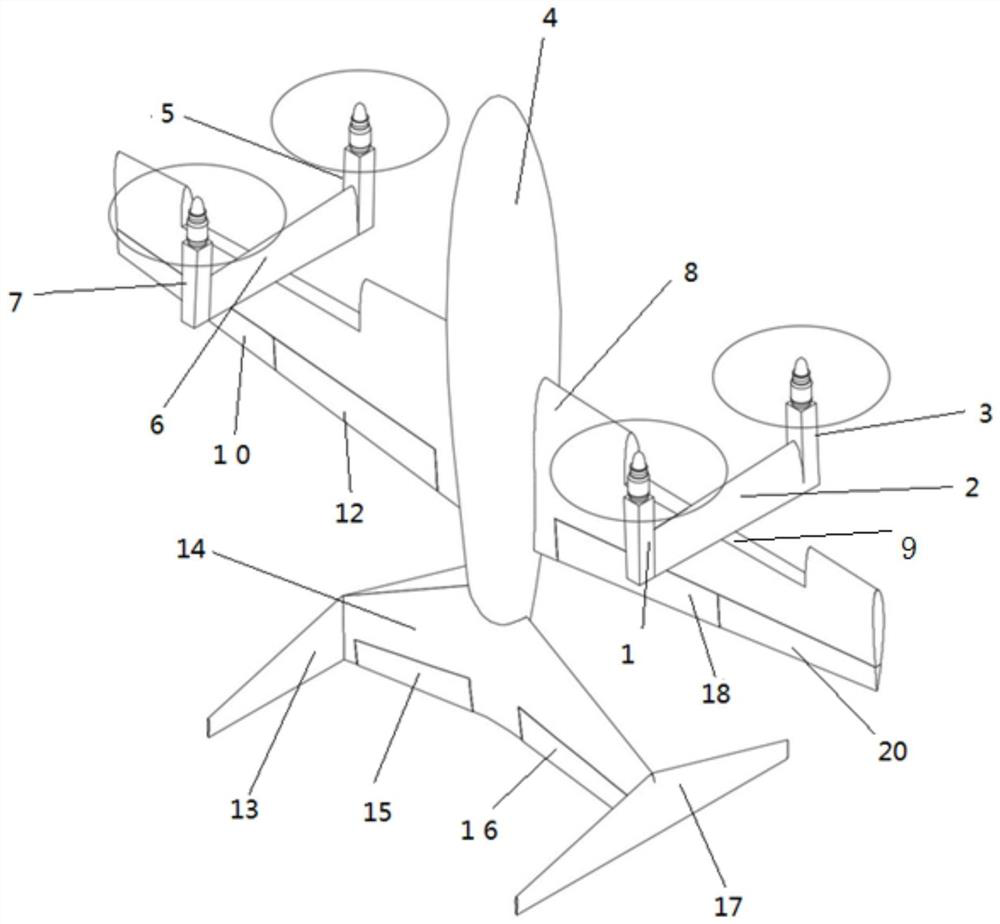
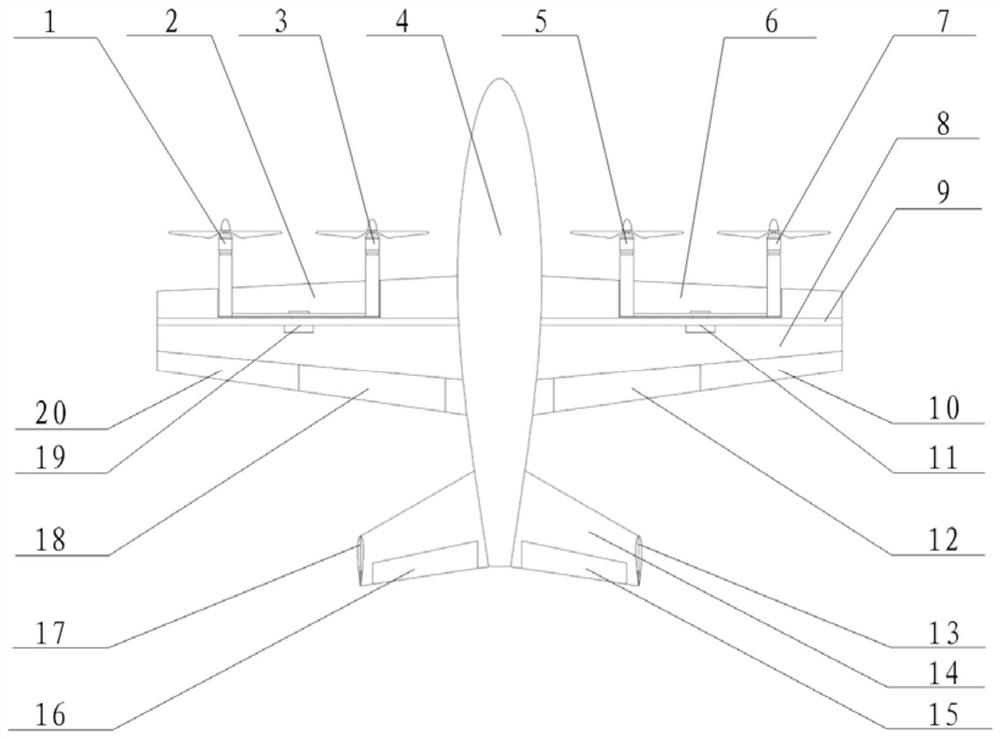
[0050] figure 1 , figure 2 A schematic diagram of a four-engine dual-arm vertical take-off and landing drone provided in an embodiment of the present invention is described in detail as follows. figure 1 When the UAV is in the vertical take-off and landing mode with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More