

High-speed precise multi-axis material taking robot
A robot and precision technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of inability to meet the requirements of high precision, high speed and high stability, occupy a large space, and high equipment costs, and achieve accurate pick and place, saving The effect of high space and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
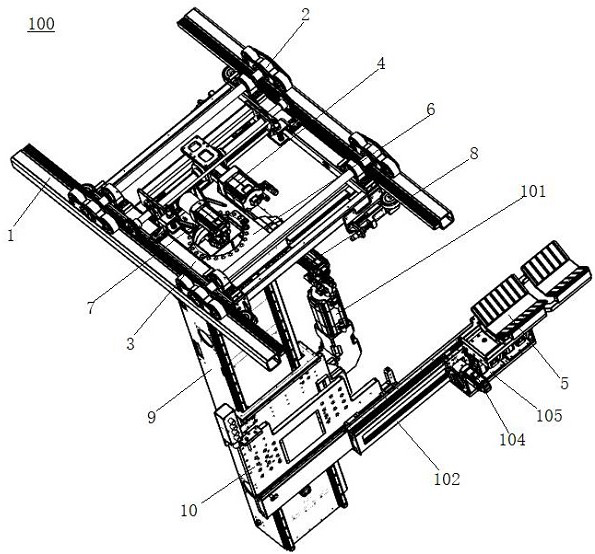
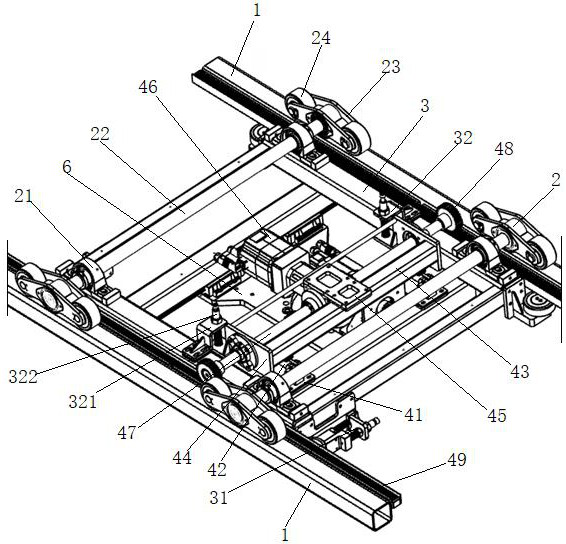
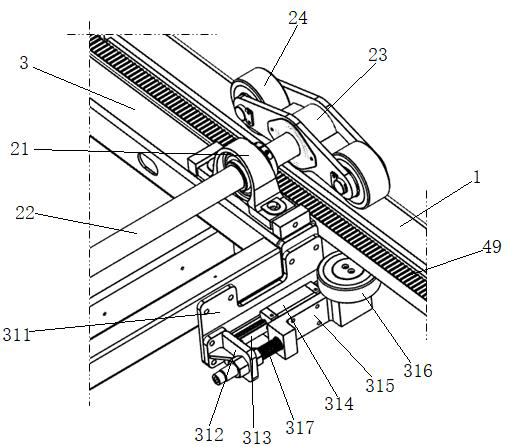
[0043] Please refer to Figure 1-Figure 9 , the present embodiment is a high-speed precision multi-axis retrieving robot 100, which includes a pair of hollow rectangular pipe rails 1 arranged in parallel, located between the two hollow rectangular pipe rails 1 and passing through two pairs of walking components 2 on the hollow rectangular pipe rails 1 Rectangular support frame 3 walking on top, X-axis driving assembly fixed on the rectangular support frame 3 and driving the rectangular support frame 3 to move horizontally through rack and pinion cooperation 4, slidably suspended on the rectangular support frame through slider slide rails The first support plate 6 on the frame 3, the Y-axis drive assembly 7 fixed on the first support plate 6 and driving the first support plate 6 to move horizontally through rack and pinion cooperation, and the rotation drive assembly fixed on the first support plate 6 Component 8, the installation vertical cabinet 9 that is driven to rotate by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More