

Pneumatic soft robot system and method for achieving lossless grabbing
A robot system and robot technology, applied in the field of robots, can solve problems such as large collision force, damage to fragile objects, complex production process, etc., to achieve uniform curvature change, prevent too slow grasping, and good shape adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
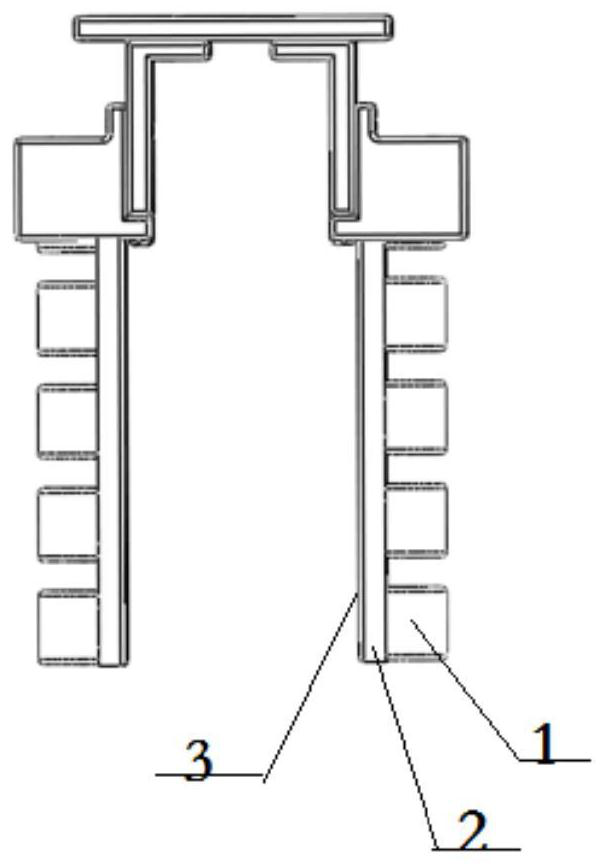
[0043] Please refer to figure 1 , figure 1 It is a schematic diagram of a pneumatic soft robot system that realizes nondestructive grasping according to a specific embodiment of the present invention; a specific embodiment of a pneumatic soft robot system that realizes nondestructive grasping is composed of two (a pair of) robotic pneumatic fingers, which are similar to two human fingers. One finger, two pneumatic fingers share the same pressure source, and at the same time receive the output air pressure from the air pipe at the output end of the electromagnetic proportional pressure regulating valve, so the two fingers can be bent at the same time to carry out the object gripping operation. The following is a detailed description of one of the pneumatic fingers.
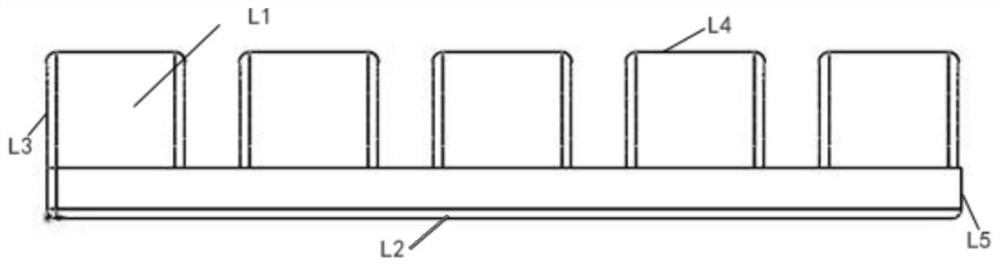
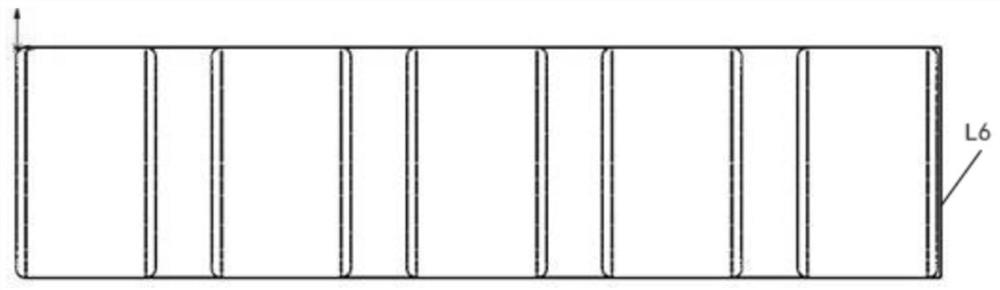
[0044]Each pneumatic finger is divided into three parts, which are cavity layer 1, strain limiting layer 2 and sensor layer 3. These three layers are all made by 3D printing, using 3D printing technology to make s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More