

Time-varying feedback finite time control method for controlling limited satellite formation flight system
A formation flight, limited satellite technology, applied in general control systems, control/regulation systems, aircraft, etc., can solve problems such as large controller input amplitude and chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0016] Specific implementation mode one: the time-varying feedback finite-time stabilization method of the control-limited spacecraft rendezvous control system, which is implemented in the following steps:
[0017] Step 1: Establish the orbital dynamics model of the control-constrained satellite formation flight system and obtain the state space equation, establish the signal model to be tracked and obtain the state space equation;
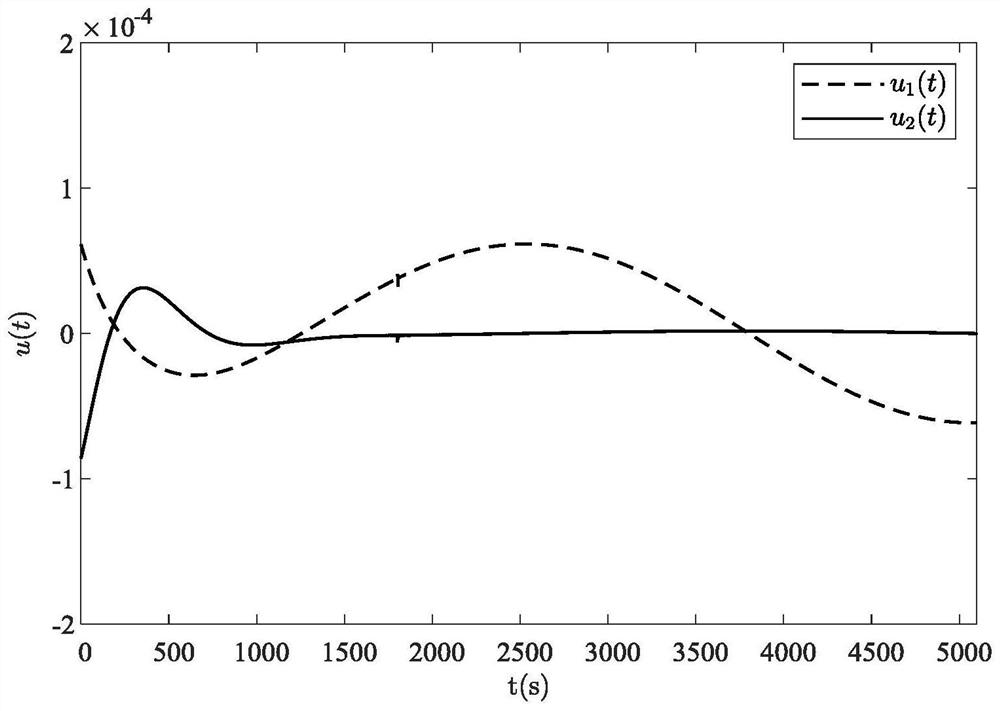
[0018] Step 2: Establish the parameter Lyapunov equation and analyze its properties. Through the positive definite solution P(γ) of the parameter Lyapunov equation, design an explicit linear time-varying feedback control law, and then establish the output regulation equation. Through the solution of the output regulation equation, design an explicit The linear time-varying feedforward control law is designed, and finally the time-varying state controller is designed to control the limited satellite formation flight system through the linear time-va...
specific Embodiment approach 2
[0021] Specific embodiment two: the difference between this embodiment and specific embodiment one is: step one is specifically: set up the mathematical model of satellite formation flight system: consider the situation that target satellite moves on the plane circular orbit, wherein R e is the orbital radius of the earth, r ref is the orbital radius of the target satellite, i ref is the initial inclination of the target satellite’s reference orbit, J 2 is the potential constant in the quadratic spherical harmonic function of the earth potential, θ is the phase angle between the target satellite and the pursuing satellite, (x 1 , x 2 ) is the coordinate origin in the right-hand coordinate system on the center of mass of the target satellite, is due to aerodynamic drag in the direction (x 1 , x 2 ), M is the mass of the star, G is the gravitational constant, μ=GM is the gravitational parameter, is the orbital velocity of the target satellite, and the nonlinear relative ...
specific Embodiment approach 3
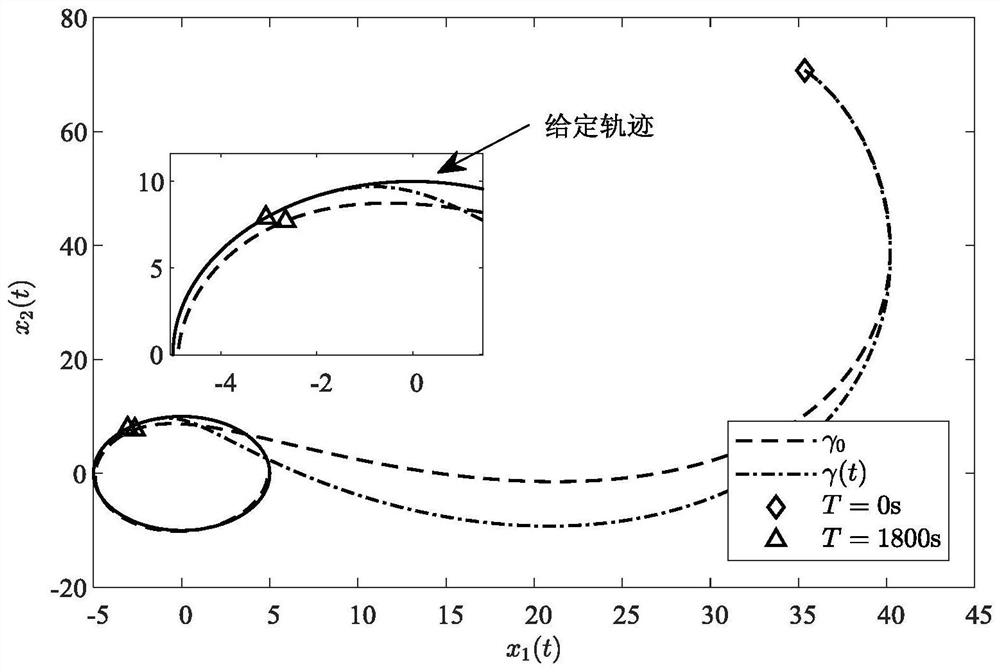
[0029] Specific embodiment three, what this embodiment is further limited is: the specific process of step 2 is: set up the signal model to be tracked: the task of satellite formation flight is to drive state vector [x 1 ,x 2 ] T to track the given signal where r and w ref is a given constant. A given signal can therefore be described by the following linear equation of state:
[0030]
[0031] in, b=r, the tracking error e(t) can be described by the following equation:
[0032] e(t)=Cx(t)+Dw(t) (4)
[0033] in, Observation (4) shows that when e(t) tends to zero, the satellite formation flight tracking task is completed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More