

Robot anti-falling detection method
A detection method and robot technology, applied in instruments, measuring devices, surveying and mapping, navigation, etc., can solve the problem of sensor instability detection error-proof margin space, etc., and achieve the effect of high reliability of results, stable operation and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
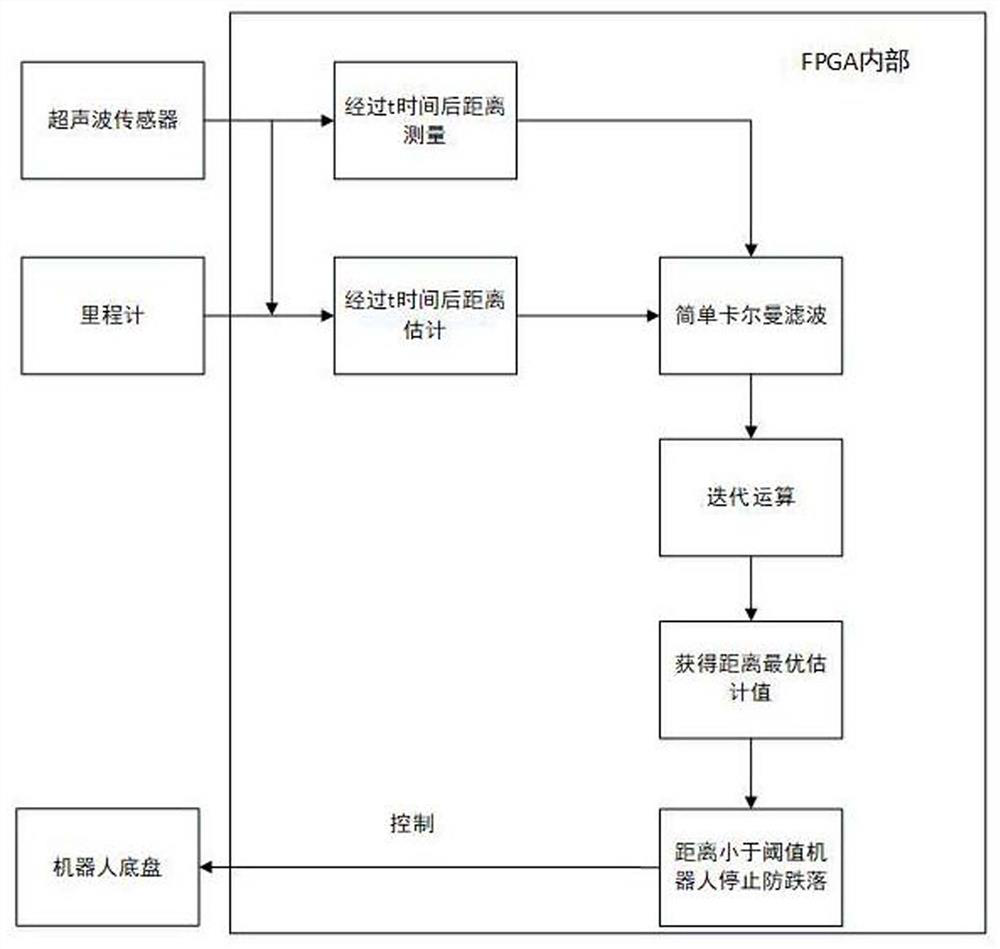
[0022] Attached below figure 1 The present invention will be further described.
[0023] A method for robot fall prevention detection, comprising the steps of:
[0024] a) An ultrasonic sensor is installed on the lower part of the front end of the robot. The initial position of the ultrasonic sensor is vertically downward. The driving device drives the ultrasonic sensor to rotate upwards by 90° and then drives it downward to the initial position, and makes the ultrasonic sensor reciprocate.
[0025] b) When the ultrasonic sensor rotates to an initial position relative to the vertical state less than 30°, the distance of the step edge detected by the ultrasonic sensor is an accurate distance; when the ultrasonic sensor rotates to an initial position relative to the vertical state greater than 30°, the detected distance When the distance from the edge of the step is 100cm-300cm, the detection distance is Sedge. Take the desktop at a height of 1m from the ground, and the ultras...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More