

Method and system for evaluating response of entity robot based on deep learning
A deep learning and robotics technology, applied in neural learning methods, instruments, error detection/correction, etc., can solve problems such as ineffectiveness, low test efficiency, and inability to achieve manual capabilities, saving time, cost, and improving productivity. The effect of improving reliability and evaluation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings.
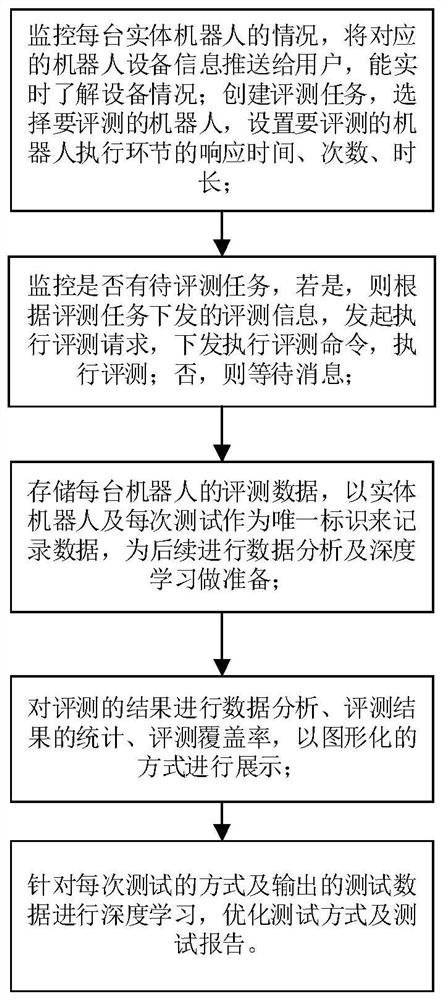
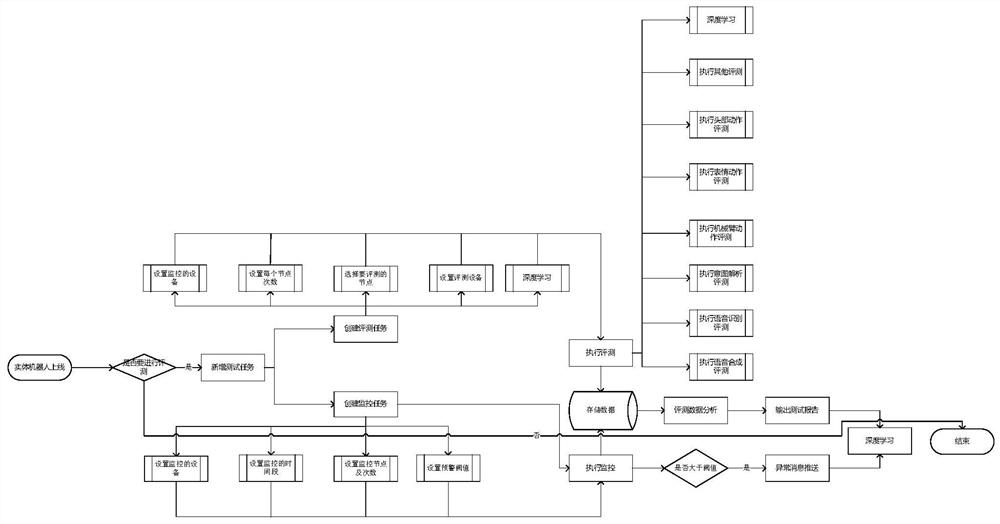
[0071] see figure 1 As shown, a method for evaluating the response of a solid robot based on deep learning of the present invention, the method includes the following steps:
[0072] Step S1. Monitor the situation of each physical robot, push the corresponding robot equipment information to the user, and be able to understand the equipment situation in real time; create an evaluation task, select the robot to be evaluated, and set the execution link of the robot to be evaluated (such as: speech recognition, Response time, times, and duration of intent analysis, speech synthesis, robotic arm, playback, etc.);
[0073] Step S2, monitor whether there is an evaluation task to be evaluated, if yes, initiate an execution evaluation request according to the evaluation information issued by the evaluation task, issue an execution evaluation command, and execute the evaluation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More