Detection two-wheel robot utilizing two-wheel differential chassis to steer
A robot and chassis technology, applied in the field of robots, can solve problems such as inability to complete detection tasks alone, inability to control steering well, slow movement, etc., and achieve the effect of satisfying convenience, increasing adjustability, and facilitating adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
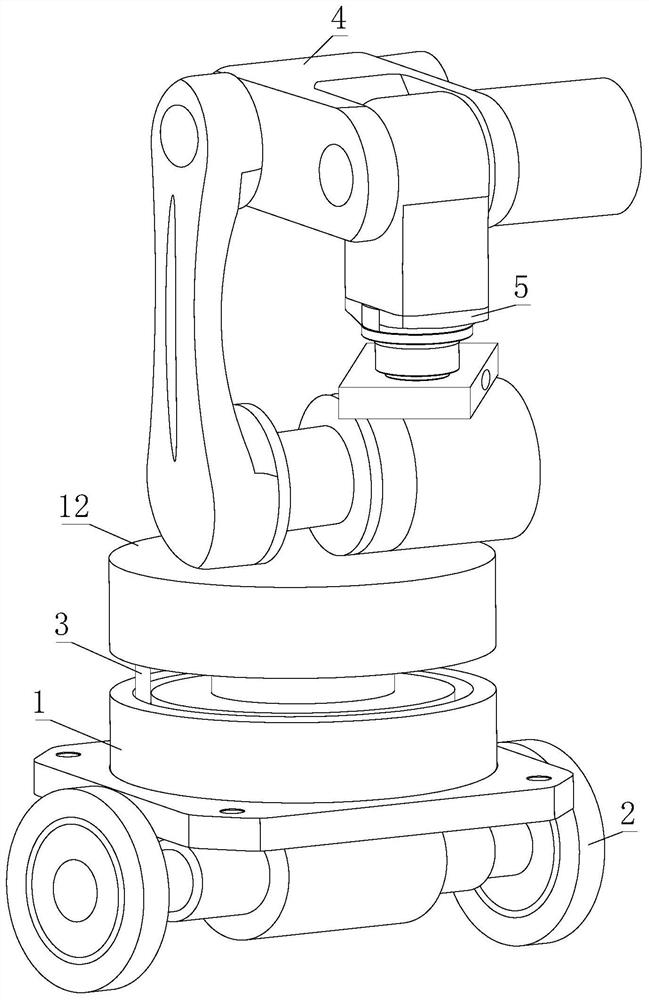
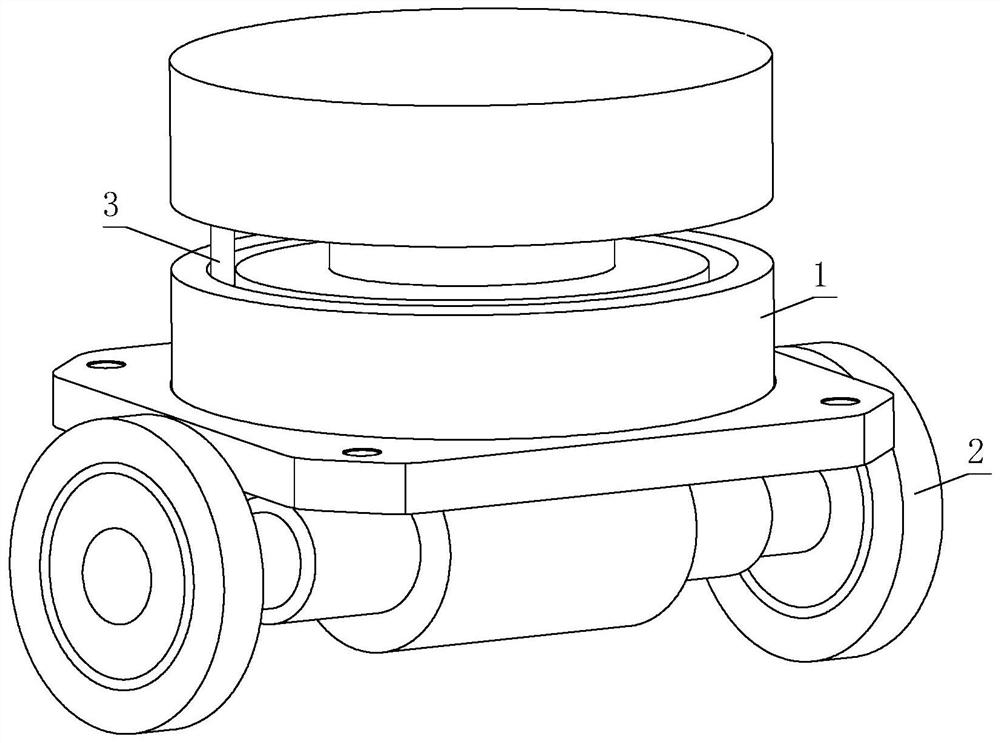
[0034] see Figure 1-Figure 2 , a detection two-wheel robot utilizing two-wheel differential chassis steering, including a chassis 1, a moving assembly 2 is arranged at the lower end of the chassis 1, and the upper part of the moving assembly 2 is installed with the chassis 1 through a mounting plate 11, and the chassis 1 The top of the movable shaft plate 12 is connected to the movable shaft plate 12, and the positioning device 3 is arranged between the chassis 1 and the movable shaft plate 12. The top of the movable shaft plate 12 is connected to the orientation adjustment assembly 4, and the bottom of the orientation adjustment assembly 4 is connected to the detection assembly 5.
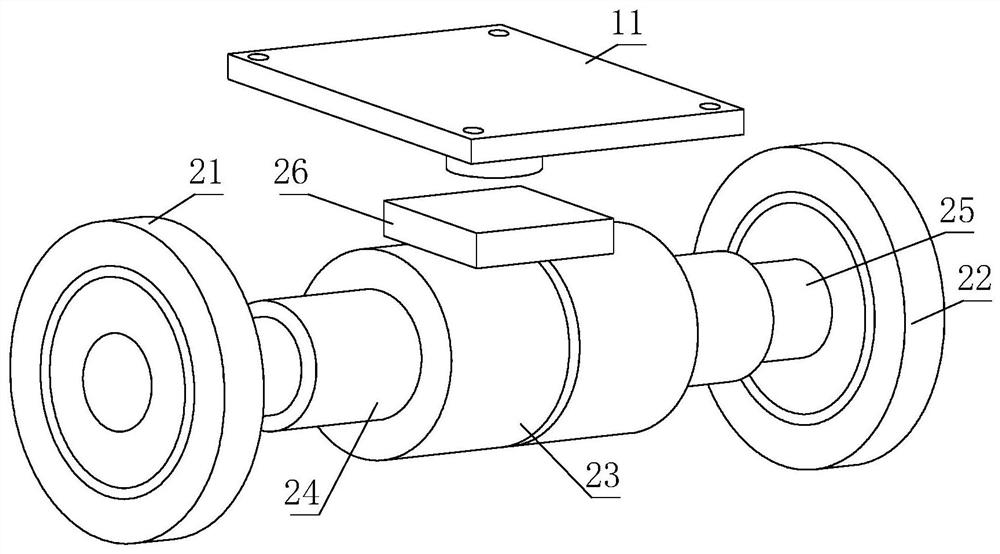
[0035] see image 3, the moving assembly 2 includes a roller A21, a roller B22, a bidirectional motor 23, a speed reducer 24, a rotating rod 25 and a control system 26, the roller A21 and the roller B22 are connected to the output end of the bidirectional motor 23 through the rotating rod 25, and...
Embodiment 2
[0040] see Figure 9-Figure 10 , a detection two-wheel robot utilizing two-wheel differential chassis steering, including a chassis 1, a moving assembly 2 is arranged at the lower end of the chassis 1, and the upper part of the moving assembly 2 is installed with the chassis 1 through a mounting plate 11, and the chassis 1 The upper part of the movable shaft plate 12 is connected, and the positioning device 3 is arranged between the chassis 1 and the movable shaft plate 12. The upper part of the movable shaft plate 12 is connected with the azimuth adjustment assembly 4, and the lower part of the azimuth adjustment assembly 4 is connected with the detection assembly 5, and the moving assembly 2 Including roller A21, roller B22, bidirectional motor 23, reducer 24, rotating rod 25 and control system 26, both roller A21 and roller B22 are docked with the output end of bidirectional motor 23 through rotating rod 25, and a speed reducer is arranged between the rotating rods 25 24. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More