

Formation unmanned aerial vehicle multi-angle strike flight path planning method based on grid planning algorithm
A track planning and unmanned aerial vehicle technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. Problems such as limited computing power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
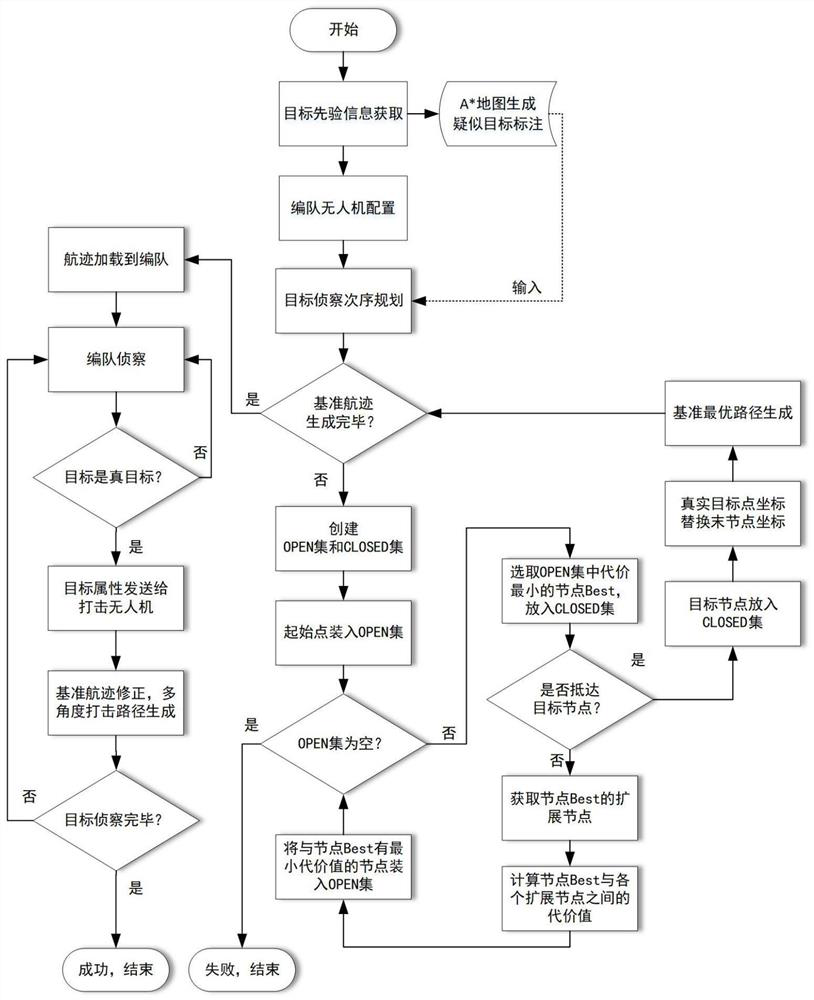
[0078]The flying speed of the UAV of this embodiment is 30m / s, the minimum turning radius is 150m, and the reconnaissance range of the reconnaissance load is 80m. In order to improve planning efficiency and make the path shortest, the grid planning algorithm is preferably the A* algorithm. Such asfigure 1 As shown, the method for multi-angle strike trajectory planning of formation drones based on grid planning algorithm disclosed in this embodiment includes the following steps:
[0079]Step 1: Obtain the prior information of the suspected target, design an A* map and mark the suspected target on the A* map.
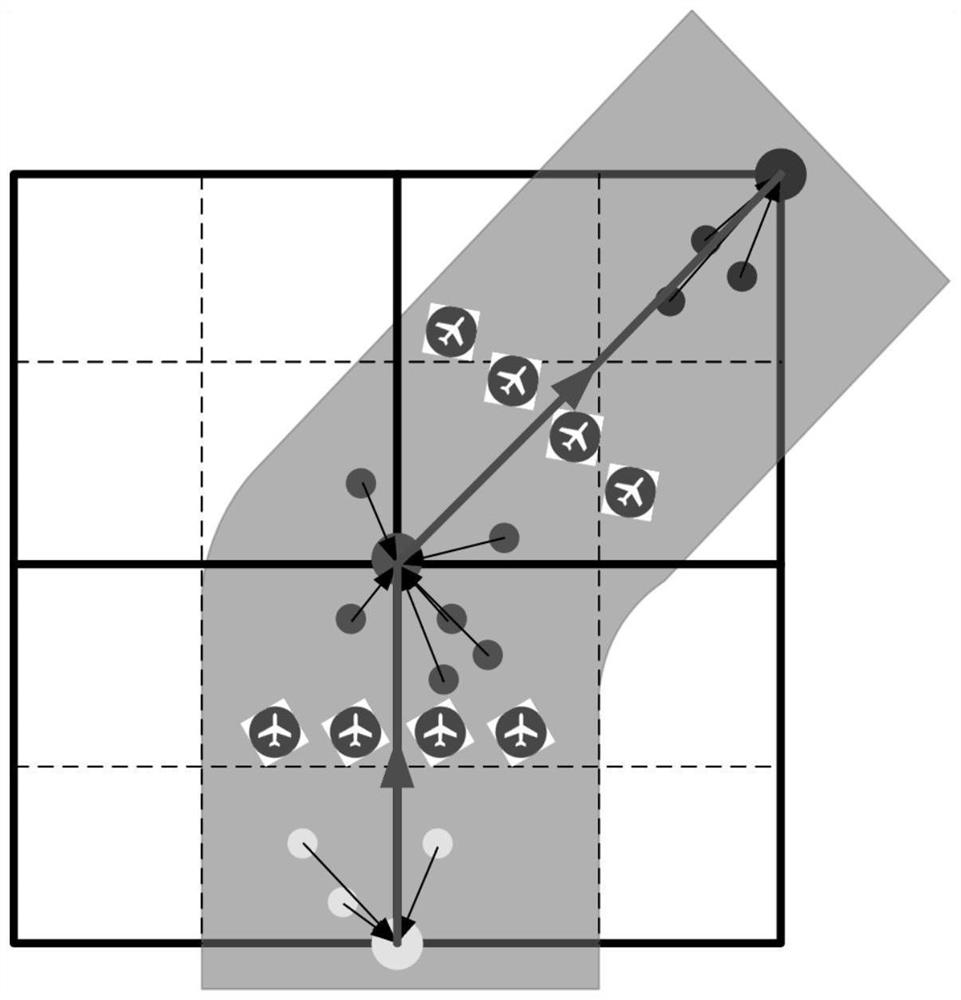
[0080]A*map grid uses a square grid, and the grid width is set to 2 times the turning radius of the drone, which is 300m. Set 4 suspected targets (unknown target value information at this time), the starting point of the formation drone is at the origin of the A* map coordinates, and the targets are integrated into the A* map node. Target coordinate integration methods such asfigure ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More