Semantic SLAM-based mobile robot automatic navigation and target recognition algorithm
A mobile robot and automatic navigation technology, which is applied in navigation computing tools, character and pattern recognition, machine learning, etc., can solve the problems of V-SLAM technology not being robust enough, achieve model generalization capability enhancement, ensure accuracy, and improve efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be further described below.
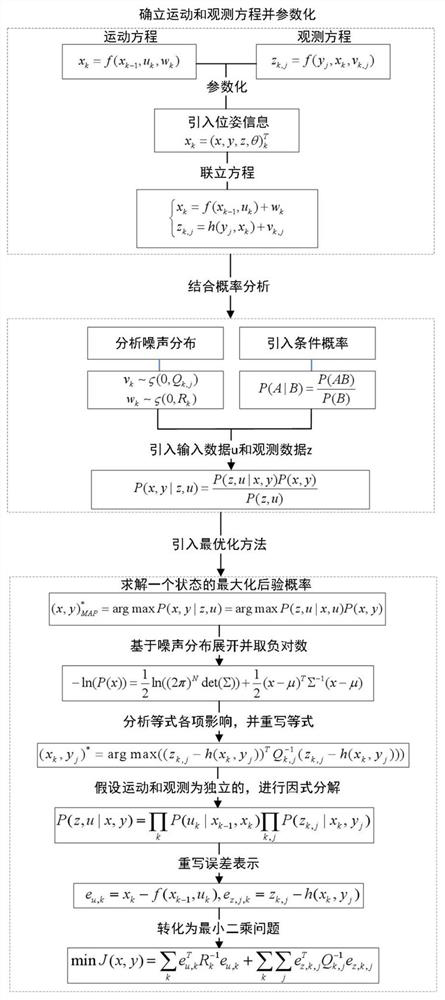
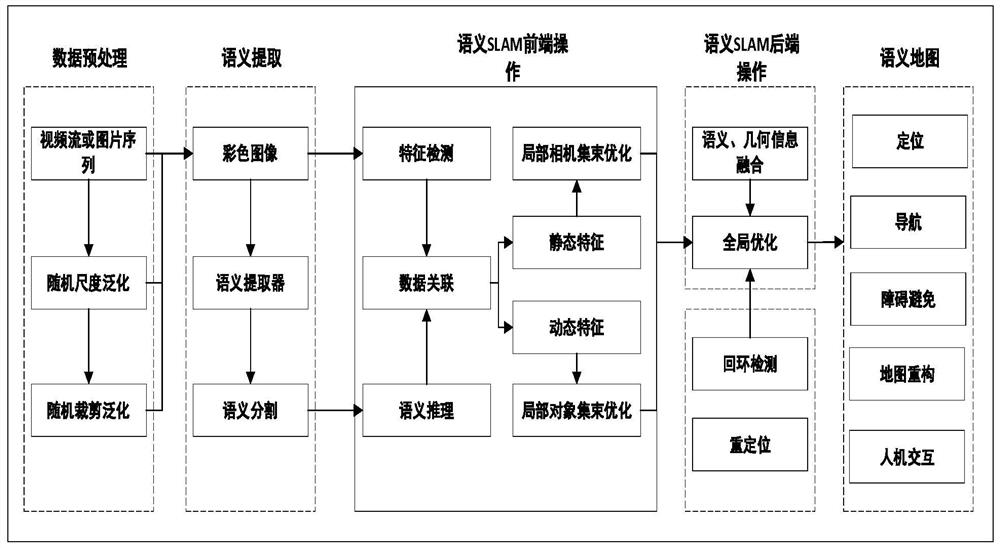
[0041] like Figure 1 to Figure 4 Shown, the concrete steps of the present invention are:
[0042] S1. The autonomous mobile robot collects pictures of the surrounding environment through the camera in the workshop, and then performs preprocessing operations on the collected pictures to obtain picture data with strong generalization ability, consistent scale, and sufficient quantity; the quality of the initial picture determines the semantic features The degree of excellence and the accuracy of subsequent SLAM-related tasks further determine the efficiency and accuracy of autonomous mobile robot-related tasks. The specific steps of the preprocessing operation are:
[0043] S11. Image data enhancement, through which the image sample size is increased and the model generalization ability is enhanced;
[0044] S12, the image is randomly cropped, and the random cropping parameters are set to process, so as to reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com