

Dynamic vision sensor and laser radar data fusion method
A visual sensor and lidar technology, applied in instrumentation, surveying and navigation, photogrammetry/video surveying, etc., can solve the problems of not reaching pixel-level accuracy, large amount of calculation, etc., to reduce the amount of calculation and improve the accuracy , avoid the effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
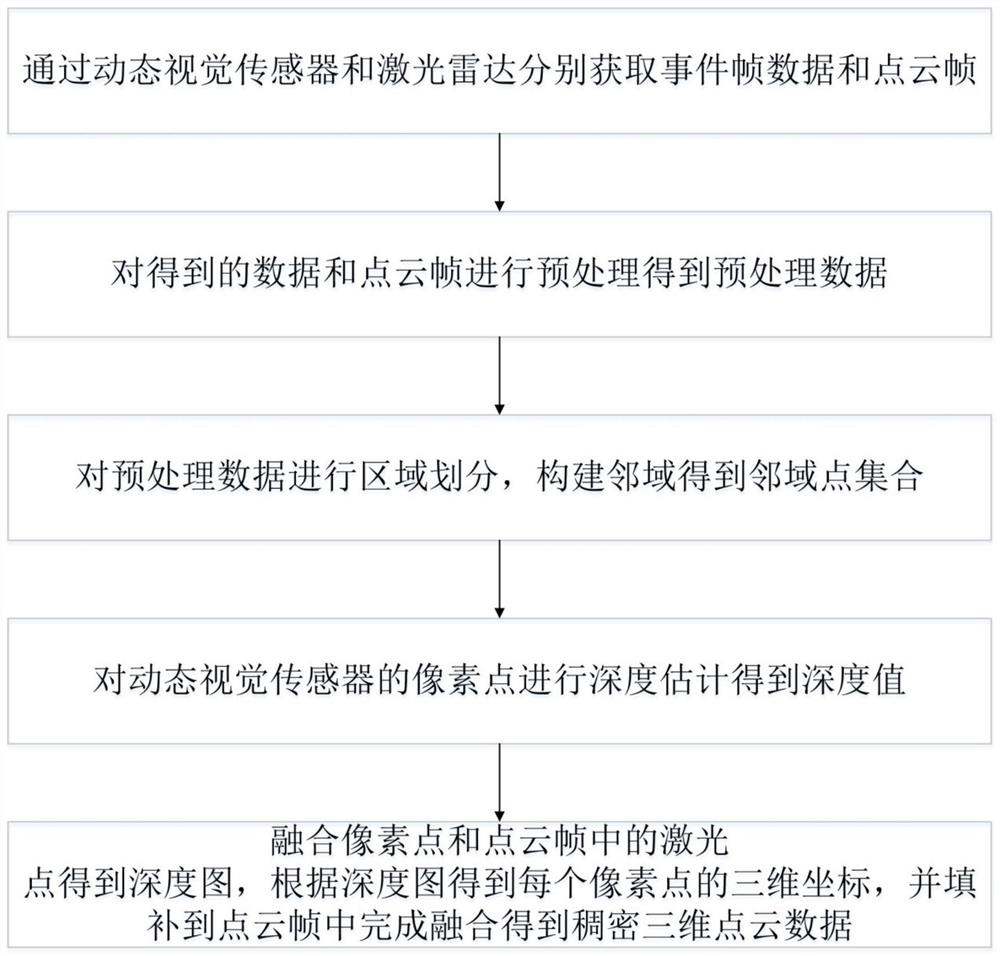
[0063] Such as figure 1 Shown is the embodiment of the method for fusion of dynamic visual sensor and laser radar data of the present invention, comprising the following steps:
[0064] S1: Obtain event frame data and point cloud frames through dynamic visual sensors and lidar respectively;
[0065] S2: Preprocessing the obtained data and point cloud frames to obtain preprocessed data;
[0066] S3: Divide the preprocessed data into regions, construct neighborhoods to obtain a set of neighborhood points;
[0067] S4: Perform depth estimation on the pixels of the dynamic vision sensor to obtain a depth value;
[0068] S5: Fusion pixel points and points in the point cloud frame to obtain a depth map, obtain the three-dimensional coordinates of each pixel point according to the depth map, and fill it into the point cloud frame to complete the fusion to obtain dense three-dimensional point cloud data.
[0069] The data produced by dynamic vision sensors is a stream of events. A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More