Endoscope perfusion system for non-contact monitoring of intrarenal pressure
A non-contact, internal pressure technology, applied in endoscopes, cystoscopes, urethoscopes, etc., can solve problems such as unfavorable access and operation of surgical instruments, increased surgical risks and hospital burdens, and the space occupied by pressure measuring fibers. Disinfection and sterilization are convenient, cost-saving and safe.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
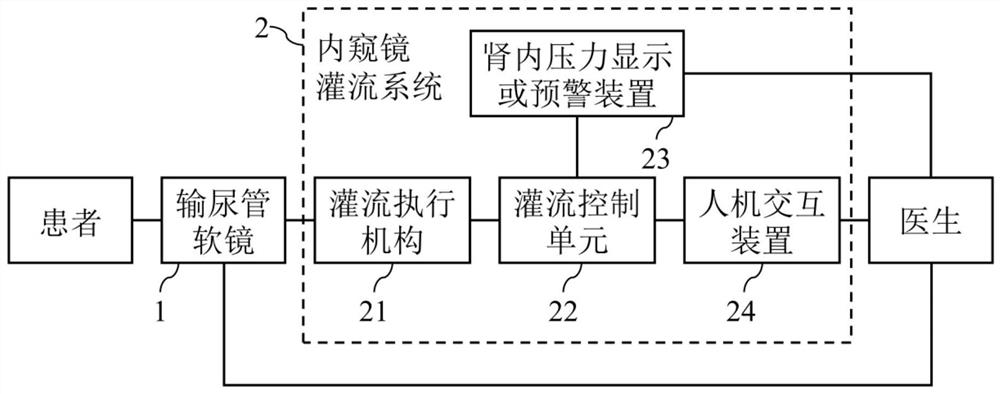
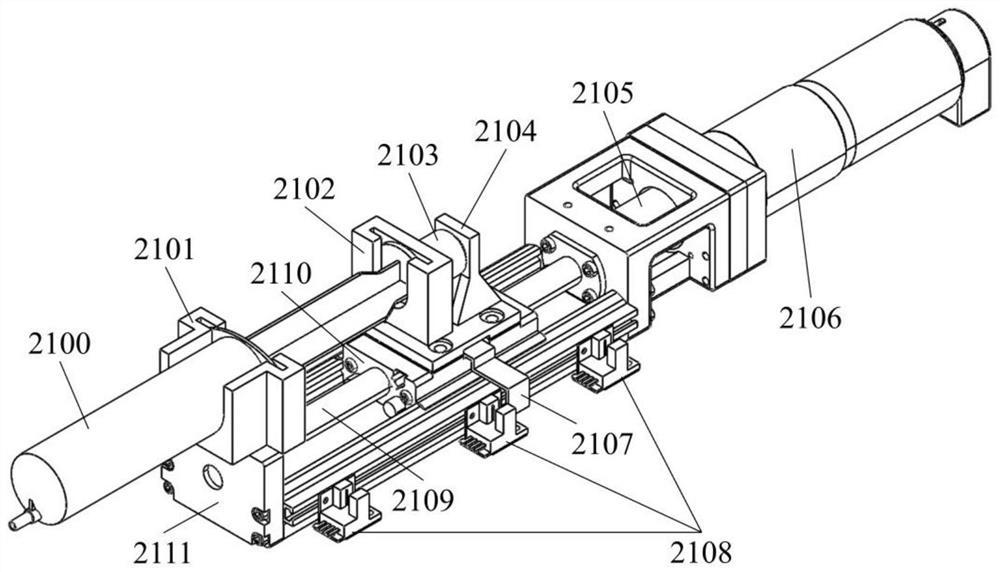
[0033] figure 1 It is a schematic diagram of the frame of an endoscope perfusion system according to an embodiment of the present invention. refer to figure 1 As shown, an endoscope perfusion system 2 is provided in this embodiment, and the system includes: a perfusion actuator 21 and a perfusion control unit 22 . Wherein, the perfusion actuator 21 includes a liquid injection device and a force sensor 2103, the liquid injection device is used to complete the liquid injection during the operation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More