A dynamic programming method for picking sequence of spherical fruits
A dynamic planning, spherical-like technology, applied in the fields of picking machines, agricultural machinery and implements, agriculture, etc., can solve the problems of fruit damage and low picking efficiency, achieve short picking paths, avoid fruit damage, improve picking efficiency and picking success. rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
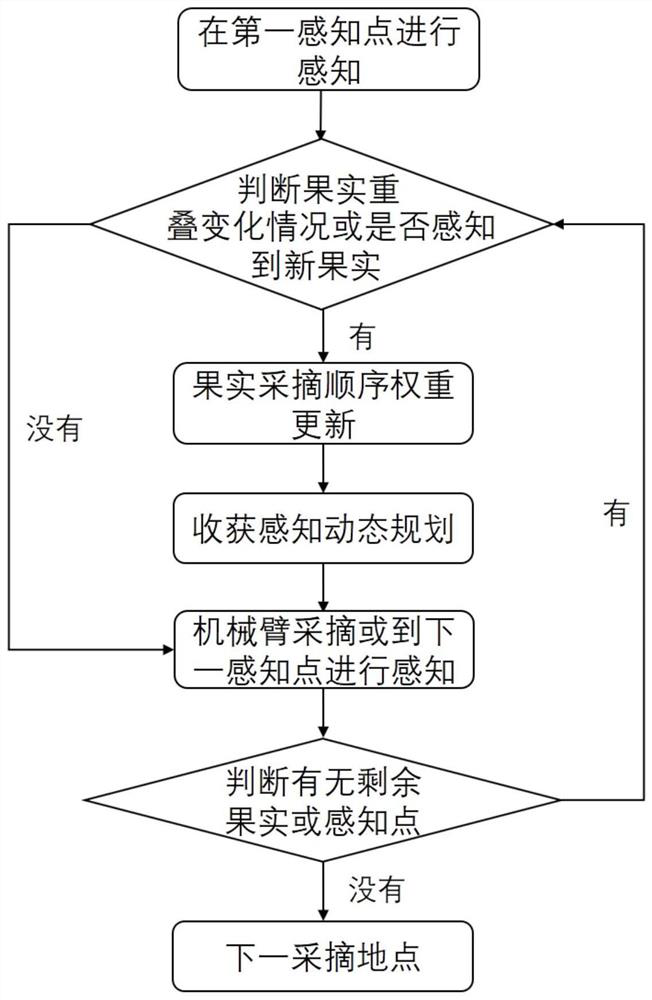
[0048] The picking flow chart of the picking robot based on the dynamic harvesting perception method is as follows: figure 1 shown. After the picking robot arrives at the picking position, it first senses at the default position, that is, the first sensing point. The binocular camera collects the environmental information and uses the deep learning algorithm to identify and locate the fruit. Process the collected fruit location information, compare all the fruit locations, if any fruit location is found to be similar, then update its fruit weight to avoid the situation where the rear fruit is picked first and the front fruit is destroyed. After the fruit weights are updated, the fruit picking sequence is planned using the dynamic harvest perception planning method, and the robotic arm picks according to the planned path. After picking a fruit or completing the perception of a sensing point, the picking robot judges whether there are remaining fruits or sensing points. Comple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



