Robot terminal load mass detection method and device and industrial robot
A quality detection method and detection device technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of increasing the cost of robots and reducing the flexibility of robots, and achieve the effect of reducing design costs and increasing available space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
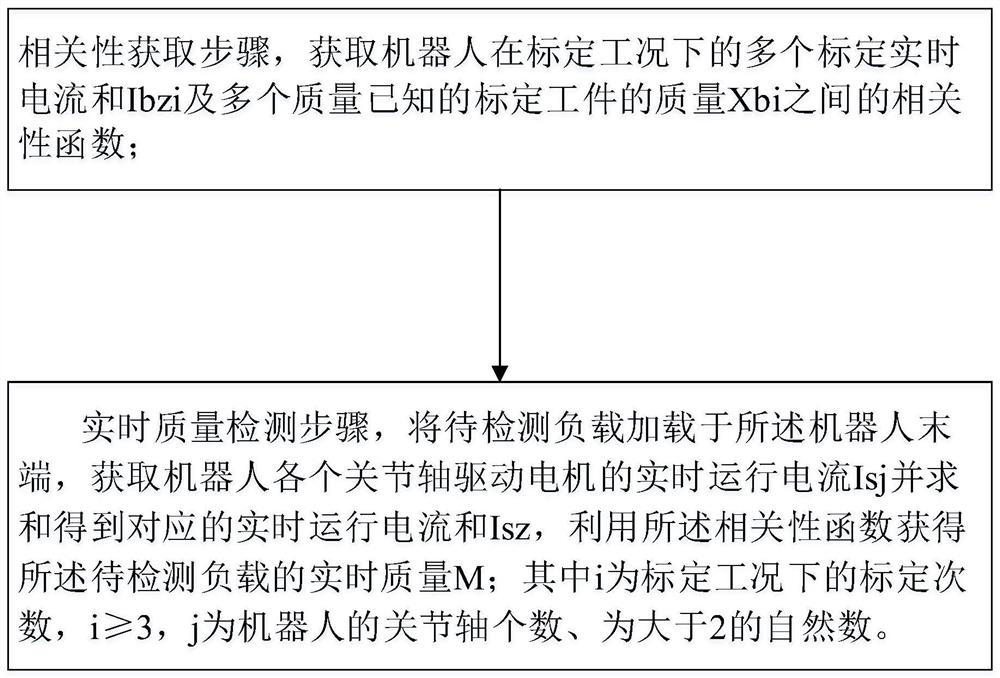
[0027] see in conjunction Figure 1 to Figure 5 As shown, according to an embodiment of the present invention, a method for detecting the load quality of a robot end is provided, including:
[0028] The correlation acquisition step is to obtain multiple calibration real-time currents and Ibzi (that is, Figure 5 Q in ) and the mass Xbi of a plurality of calibration workpieces with known mass (that is, Figure 5 The correlation function between Xg) in ;
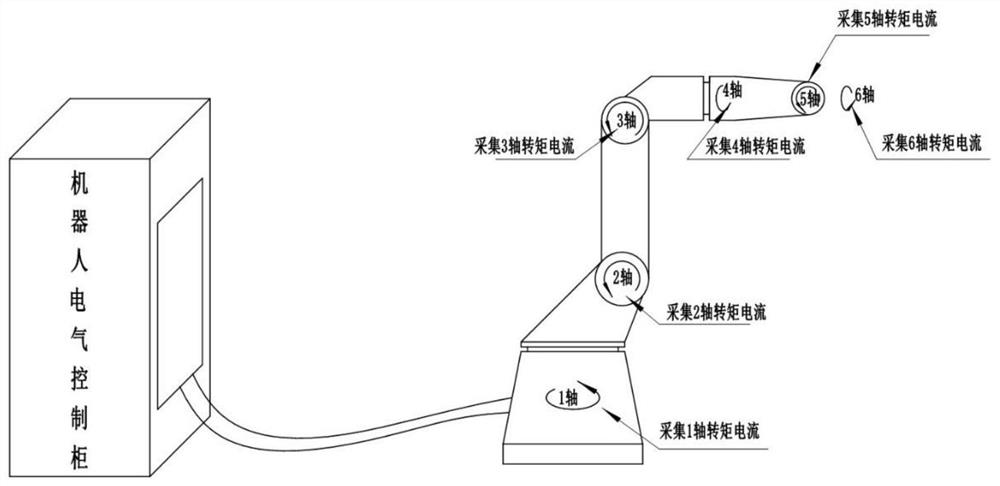
[0029] The real-time quality detection step is to load the load to be detected on the end of the robot, obtain the real-time running current Isj of the drive motors of each joint axis of the robot and sum them to obtain the corresponding real-time running current and Isz, and use the correlation function to obtain the waiting Detect the real-time quality M of the load;
[0030] Where i is the number of calibrations under calibration conditions, i≥3, and j is the number of joint axes of the robot, which is a natural number g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



