

Unmanned aerial vehicle positioning method based on image registration
A technology of image registration and positioning method, which is applied in image analysis, image data processing, computer components, etc., can solve problems such as inability to obtain homography matrix, difficult to match points correctly, large-scale differences and rotation angles, etc., to achieve Improve stability and accuracy, good significance, reduce the effect of scale difference and rotation difference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to make the purpose, technical solution and advantages of the method more clear, further detailed description will be given below in conjunction with the accompanying drawings and embodiments.
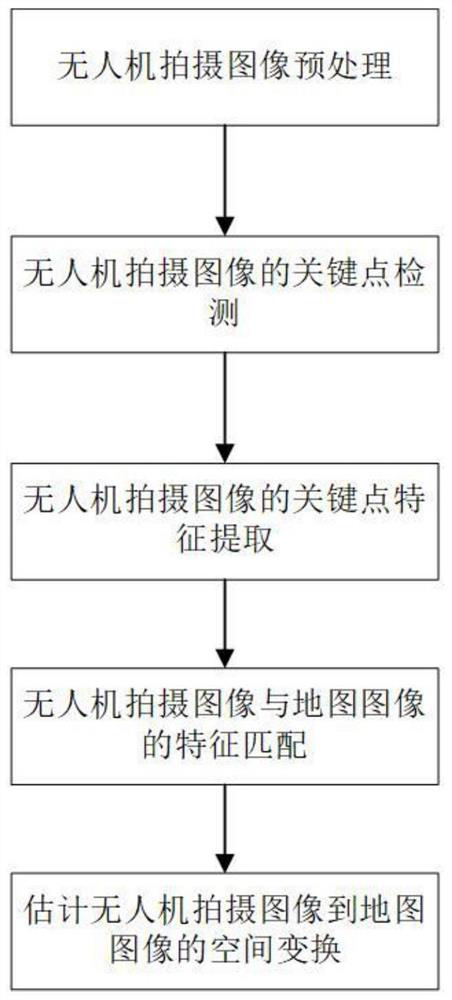
[0018] Such as figure 1 As shown, the UAV positioning method based on image registration of the present invention includes the following steps:
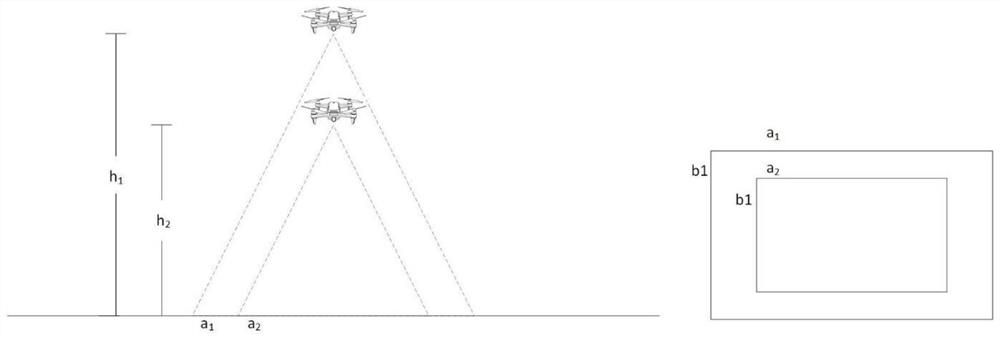
[0019] (1) UAV image preprocessing, obtain the flight height of the UAV from the height sensor carried by the UAV, and obtain the flight direction of the UAV from the course sensor carried by the UAV, according to the marking information of the satellite map image Obtain the spatial resolution difference and direction difference between the UAV image and the satellite map, and perform rotation transformation and scale transformation on the UAV image to make it have the same direction and scale as the map image;
[0020] (2) The key point detection of the image taken by the UAV, using the SEEDS superpixel segmentation algorith...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More